Part Number: LP-AM243
Other Parts Discussed in Thread: SYSCONFIG
Hi,
I am using ind_comms_sdk_am243x_09_02_00_24 for my development.
I am using UART in one of my applications where I need to transmit and receive 8 bytes of data every 20 ms. Initially, I configured both TX and RX in polling (blocking) mode, and the data transfer was working correctly.
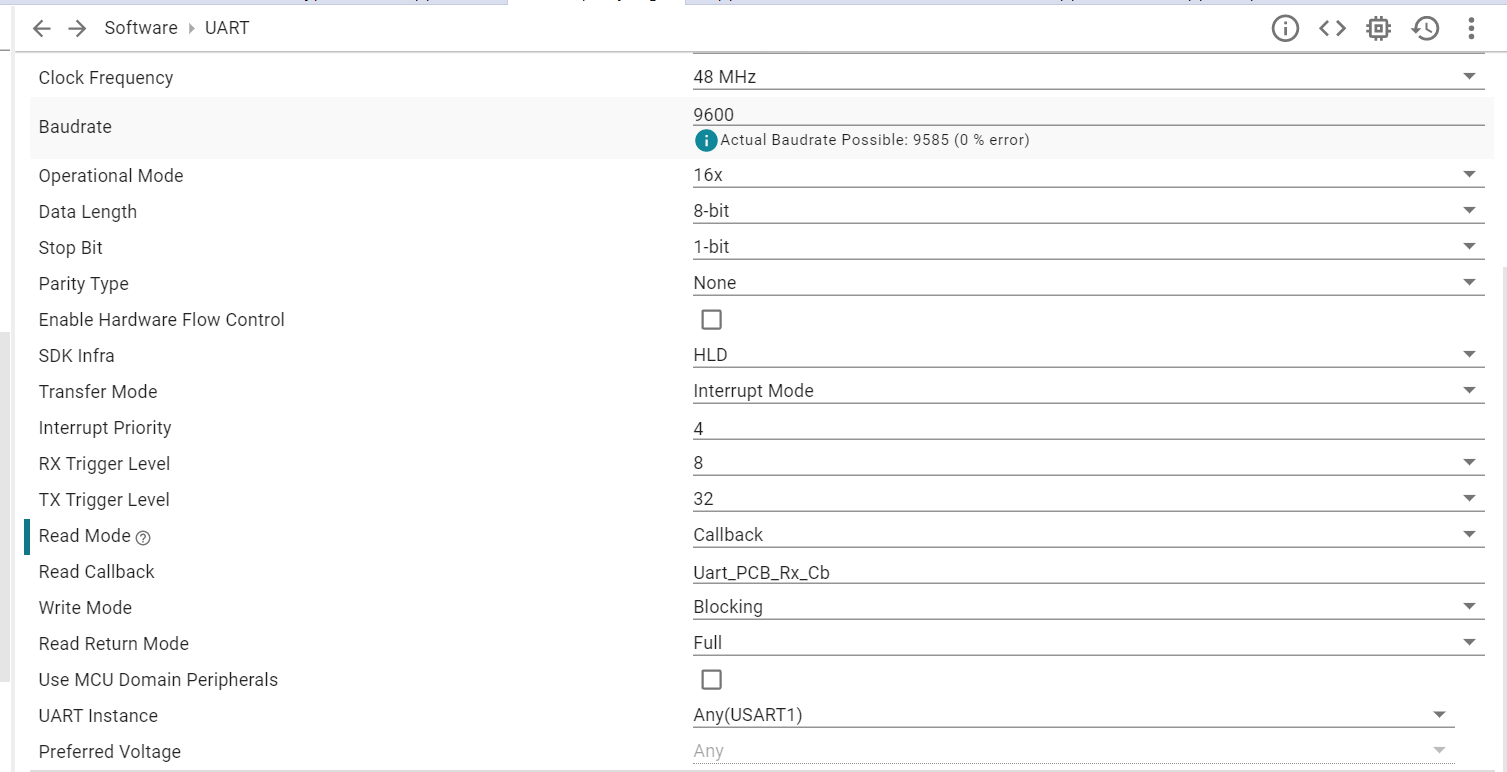
I later modified the implementation so that UART transmission remains in blocking mode, while UART reception is handled using callback (non‑blocking) mode. After updating the configuration in SysConfig and implementing this change, transmission works as expected. However, the receive callback is triggered only once.
After the first callback invocation, no further RX callbacks occur, even though I continue sending data from the terminal.