Hi,
Since I just want the Digital inputs and Digital outputs, so I modify the tiescappl.h of the 1.0.0.8 SDK.
Remove the AI and Motor Outputs and modify the XML file too.
But when I used the TwinCAT and want to active free run the "TI_ESC" device, but It always get the 0x001b value of AL status code (0x134:0x135).
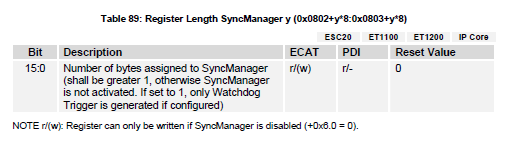
TI_ESC can't change the Safe-OP to OP mode, because the Process Data Watchdog expired.
Have any suggestion?
Following is the codes.
/******************************************************************************
* Object 0x1C12: RxPDO assignment
******************************************************************************/
#ifdef _OBJD_
OBJCONST TSDOINFOENTRYDESC OBJMEM asEntryDesc0x1C12[] = {
{DEFTYPE_UNSIGNED8, 0x08, ACCESS_READ},
{DEFTYPE_UNSIGNED16, 0x10, ACCESS_READ}};
//{DEFTYPE_UNSIGNED16, 0x10, ACCESS_READ}};
OBJCONST UCHAR OBJMEM aName0x1C12[] = "RxPDO assign";
#endif //#ifdef _OBJD_
typedef struct STRUCT_PACKED_START {
UINT16 u16SubIndex0;
UINT16 aEntries[1];
} STRUCT_PACKED_END
TOBJ1C12;
PROTO TOBJ1C12 sRxPDOassign
#ifdef _TIESC_HW_
= {0x01, {0x1601}}//, 0x1602}}
#endif
;
/******************************************************************************
* Object 0x1C13: TxPDO assignment
******************************************************************************/
#ifdef _OBJD_
OBJCONST TSDOINFOENTRYDESC OBJMEM asEntryDesc0x1C13[] = {
{DEFTYPE_UNSIGNED8, 0x08, ACCESS_READ},
{DEFTYPE_UNSIGNED16, 0x10, ACCESS_READ}};
//{DEFTYPE_UNSIGNED16, 0x10, ACCESS_READ}};
OBJCONST UCHAR OBJMEM aName0x1C13[] = "TxPDO assign";
#endif //#ifdef _OBJD_
typedef struct STRUCT_PACKED_START {
UINT16 u16SubIndex0;
UINT16 aEntries[1];
} STRUCT_PACKED_END
TOBJ1C13;
PROTO TOBJ1C13 sTxPDOassign
#ifdef _TIESC_HW_
= {0x01, {0x1A00}}//, 0x1A03}}
#endif
;
#ifdef _OBJD_
/*if _PIC18 is enabled the object dictionary is fixed defined in coeappl.c*/
TOBJECT OBJMEM ApplicationObjDic[] = {
/* Object 0x1601 */
{NULL,NULL, 0x1601, {DEFTYPE_PDOMAPPING, 8 | (OBJCODE_REC << 8)}, asEntryDesc0x1601, aName0x1601, &RxPDOMap, NULL, NULL, 0x0000 },
/* Object 0x1602 */
// {NULL,NULL, 0x1602, {DEFTYPE_PDOMAPPING, 3 | (OBJCODE_REC << 8)}, asEntryDesc0x1602, aName0x1602, &RxPDO1Map, NULL, NULL, 0x0000 },
/* Object 0x1A00 */
{NULL,NULL, 0x1A00, {DEFTYPE_PDOMAPPING, 8 | (OBJCODE_REC << 8)}, asEntryDesc0x1A00, aName0x1A00, &TxPDOMap, NULL, NULL, 0x0000 },
/* Object 0x1A03 */
// {NULL,NULL, 0x1A03, {DEFTYPE_PDOMAPPING, 2 | (OBJCODE_REC << 8)}, asEntryDesc0x1A03, aName0x1A03, &sAITxPDO1Map, NULL, NULL, 0x0000 },
/* Object 0x1C12 */
{NULL,NULL, 0x1C12, {DEFTYPE_UNSIGNED16, 1 | (OBJCODE_ARR << 8)}, asEntryDesc0x1C12, aName0x1C12, &sRxPDOassign, NULL, NULL, 0x0000 },
/* Object 0x1C13 */
{NULL,NULL, 0x1C13, {DEFTYPE_UNSIGNED16, 1 | (OBJCODE_ARR << 8)}, asEntryDesc0x1C13, aName0x1C13, &sTxPDOassign, NULL, NULL, 0x0000 },
/* Object 0x6000 */
{NULL,NULL, 0x6000, {DEFTYPE_RECORD, 8 | (OBJCODE_REC << 8)}, asEntryDesc0x6000, aName0x6000, &sDIInputs, NULL, NULL, 0x0000 },
/* Object 0x6020 */
// {NULL,NULL, 0x6030, {DEFTYPE_RECORD, 2 | (OBJCODE_REC << 8)}, asEntryDesc0x6030, aName0x6030, &sAI1Inputs, NULL, NULL, 0x0000 },
/* Object 0x7010 */
{NULL,NULL, 0x7010, {DEFTYPE_RECORD, 8 | (OBJCODE_REC << 8)}, asEntryDesc0x7010, aName0x7010, &sDOOutputs, NULL, NULL, 0x0000 },
/* Object 0x7020 */
// {NULL,NULL, 0x7020, {DEFTYPE_RECORD, 3 | (OBJCODE_REC << 8)}, asEntryDesc0x7020, aName0x7020, &sDO1Outputs, NULL, NULL, 0x0000 },
{NULL,NULL, 0xFFFF, {0, 0}, NULL, NULL, NULL, NULL, NULL, 0x0000}};
#endif //#ifdef _OBJD_
Best regards,
Louis chou