


Hi,
I use an AM3357 with EtherCAT firmware based on SYS/BIOS Ind. SDK V1.1.0.5. ESC firmware version reads V1.3.154. No changes made to the object dictionary, no changes made to ESI file. Beckhoff SSC version is V5.10. EtherCAT Slave Stack is running on a StarterWare base (no SYS/BIOS).
The firmware runs on a custom board.
I have the following test set:
- PC with Beckhoff TwinCAT PLC
- Our own node (TIESC-001, 1414070273 / 17)
- EK1100 bus coupler
- EL2008 8 channel output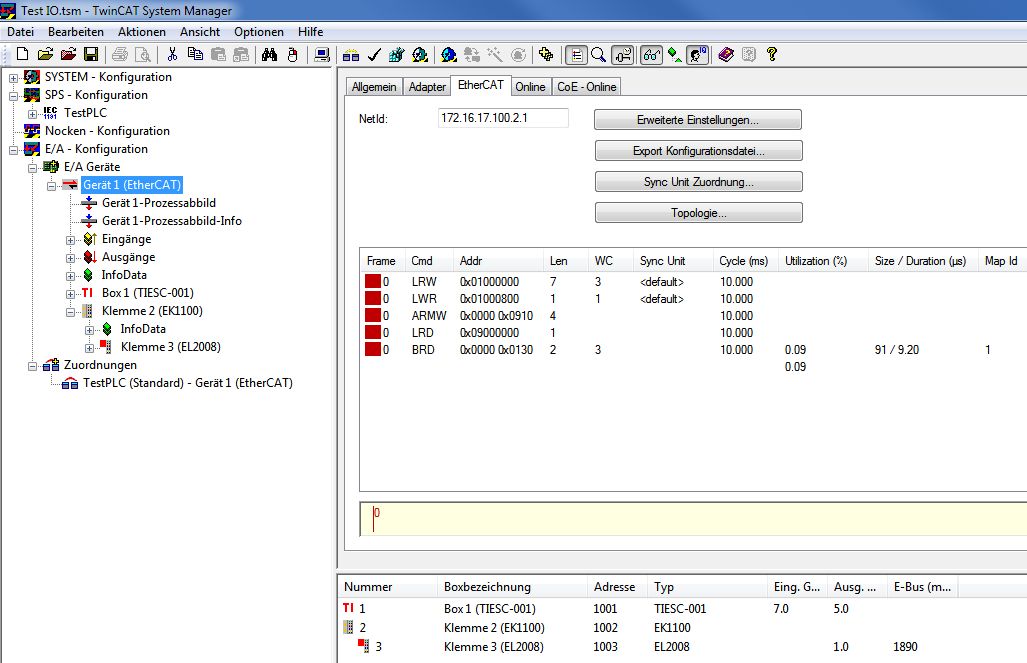
PLC task with 10ms cycle is runing on the PC toggling an boolean variable in every cycle. So there is one EtherCAT frame every 10ms. TI-ESC001 node is running in DC-synchron mode. The boolean variable has a link to one EL2008 output as well as to a TI-ESC001 output.
The system runs fine, no error messages from TwinCAT. I can read all the CoE values, no problems so far.
I expect that the output of the EL2008 node as well as the output on the TI-ESC001 node toggles every 10ms although not synchronized to each other because EL2008 does not run on DC-synchron mode. Sync0Isr() is called every 10ms without noticable jitter. It seams that DC mode is running fine.
The problem is that the output on TI-ESC001 does not toggle every 10ms. Sometimes there is no toggle for more than one EtherCAT cycle. Please see picture. Channel 1 (yellow) shows EcatIsr() entry (PDI interrupt). Channel 2 (red) shows output of TI-ESC001 and channel 3 (blue) shows output on EL2008. Output on TI-ESC001 miss to toggle at least once in this sequence.
Any ideas on this problem? For me it looks as if the output data is not valid when reading from ESC.
Thanks and best regards,
Patrick


