Hello,
I am using the Beaglebone Black (BBB) to develop a kind of Sniffer from an RS485 bus.
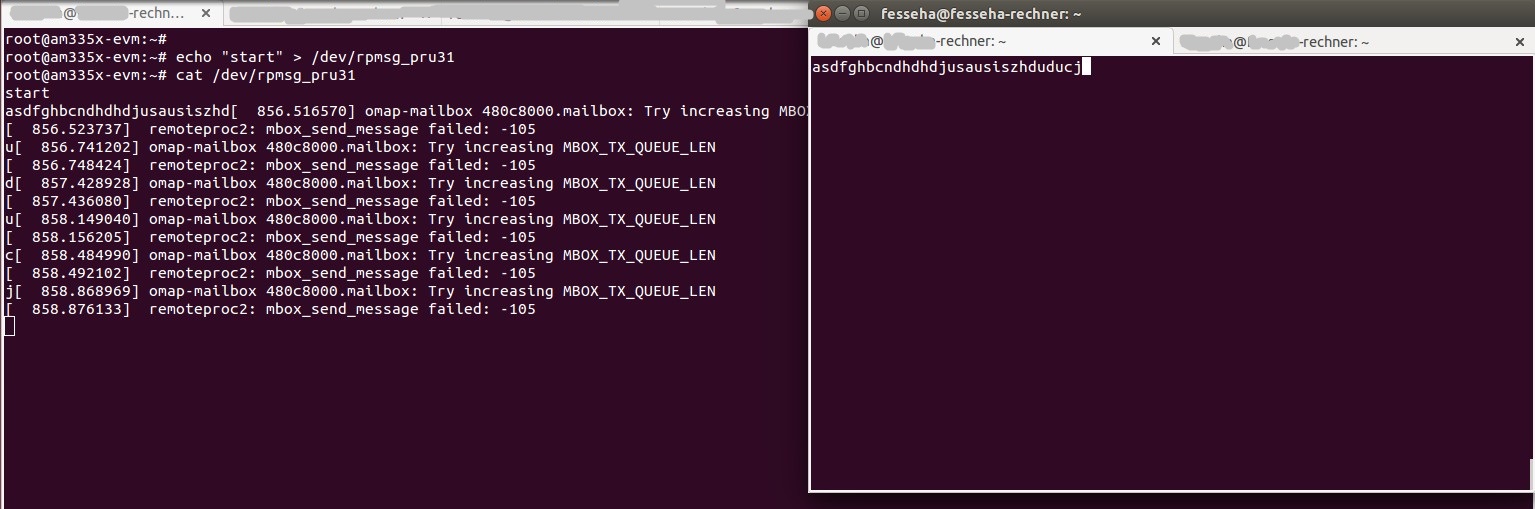
Exactly speaking, I'm trying to use the PRU UART along with a TI RS485 TRX module. In doing so I'm redirecting all data from the PRU UART to the ARM Linux on BBB. I encountered a problem in doing so. After receiving few (~26bytes) data I get the error shown below:
omap-mailbox 480c8000.mailbox: Try increasing MBOX_TX_QUEUE_LEN
remoteproc2: mbox_send_message failed: -105
If this solution works out I'm expecting lots of data from the RS485 bus. Therefore, I need a way to make data continuously flow from the PRU UART to the ARM Linux. It just needs to be a forward and forget system - no storing required. What could be the problem and how do I solve it?
Thanks