Other Parts Discussed in Thread: SYSBIOS
I am using GP evmAM572x. I want to send some data on ethernet to host PC at 1Gbps. Please tell me the flow of sending data and which file i need to change or modify. Can I use EMAC_BasicExample_evmAM572x_armBiosExampleProject at C:\ti\pdk_am57xx_1_0_3\packages\MyExampleProjects.
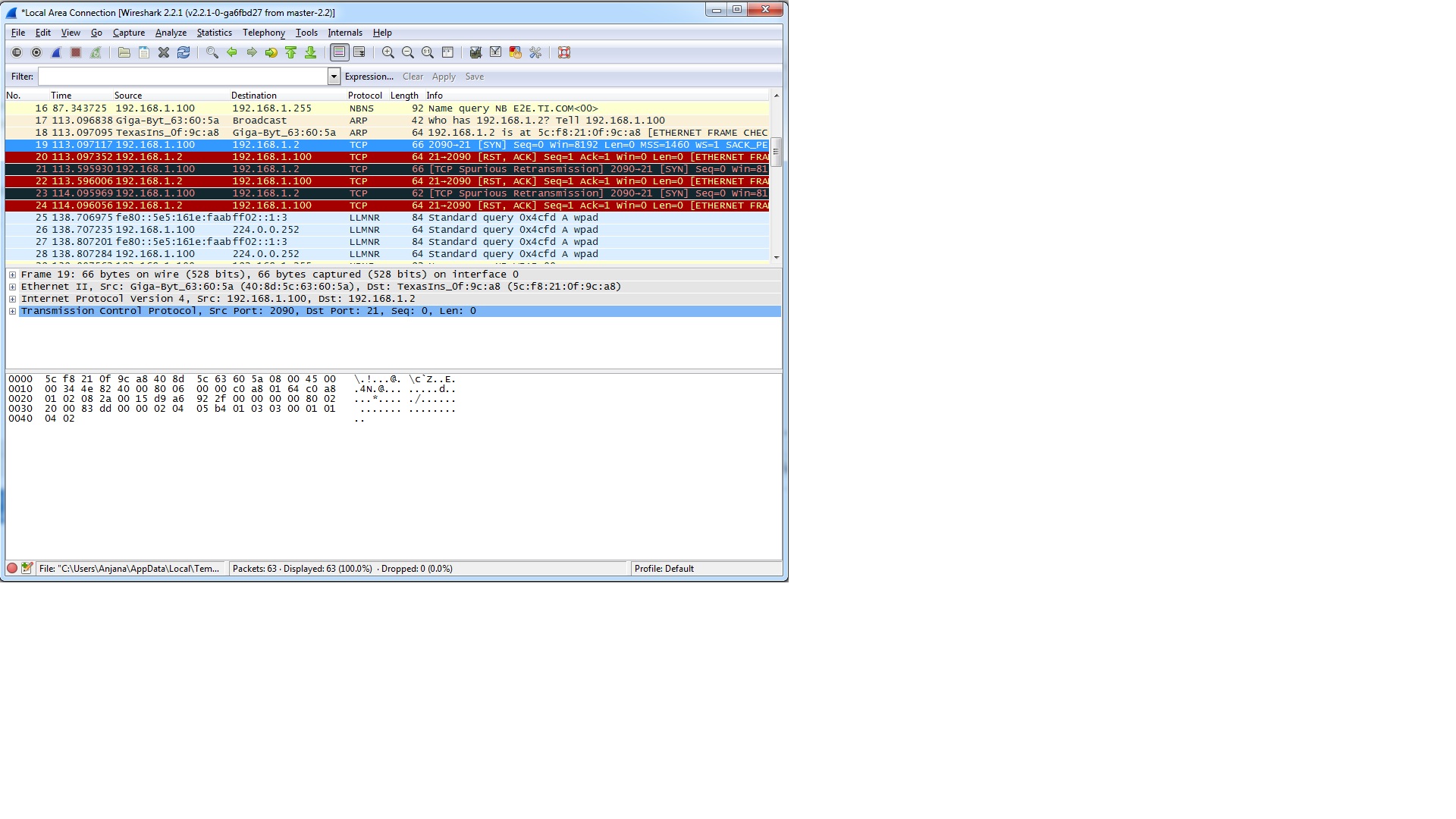
How do I change or set the ip Address of source and destination? I am new to this kind of SW architecture. Please help me out to establish the communication between target ethernet port to PC.
Thanks,
Anjana Pathak