


Dear,
I am working on AM4378 project and it is based on AM437x-gp-evm. I built sitara linux and boot from SD card now. It is working fine.
Now I wanted to transfer all linux files(MLO, uboot.img, kernel, file system, etc) to eMMC and boot it from eMMC. How do i achieve this?
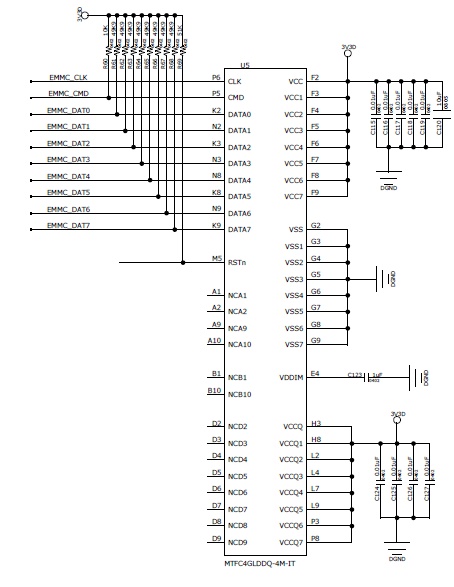
My schematic is as follows
My boot sequence given below.

I am following the below link to update files and boot from eMMC,
I enter the following command from uboot,
U-Boot # printenv partitions
uuid_disk=${uuid_gpt_disk};name=rootfs,start=2MiB,size=-,uuid=${uuid_gpt_rootfs}
U-Boot # setenv uuid_gpt_disk ...first uuid...
U-Boot # setenv uuid_gpt_rootfs ...second uuid...
U-Boot # gpt write mmc 1 ${partitions}
When i enter "U-Boot # gpt write mmc 1 ${partitions} " , I got below error,
"Card did not respond to voltage select!
do_gpt: mmc dev 1 NOT available "
What could be the reason? How do i solve this problem?
Regards,
Winiston.P



