Other Parts Discussed in Thread: SYSBIOS
Tool/software: TI-RTOS
Hello everyone,
I have recently discover a bad behavior on my Ethercat Synchronization.
My configuration is the following one:
- Sitara ARM3359
- Code Composer Studio version CCS 6.1.2.00015
- SYS/BIOS 6.45.01.29 Real Time Operating System
- XDC Tool 3.32.00.06
- Compiler GNU v4.8.4 (Linaro)
- NDK 2.24.3.35
- Sysbios sdk 2.1.3.2
- software Texas Instrument ecat_appl with beckoff path v5.11
My Ethercat frames are configured with 500us cycle time.
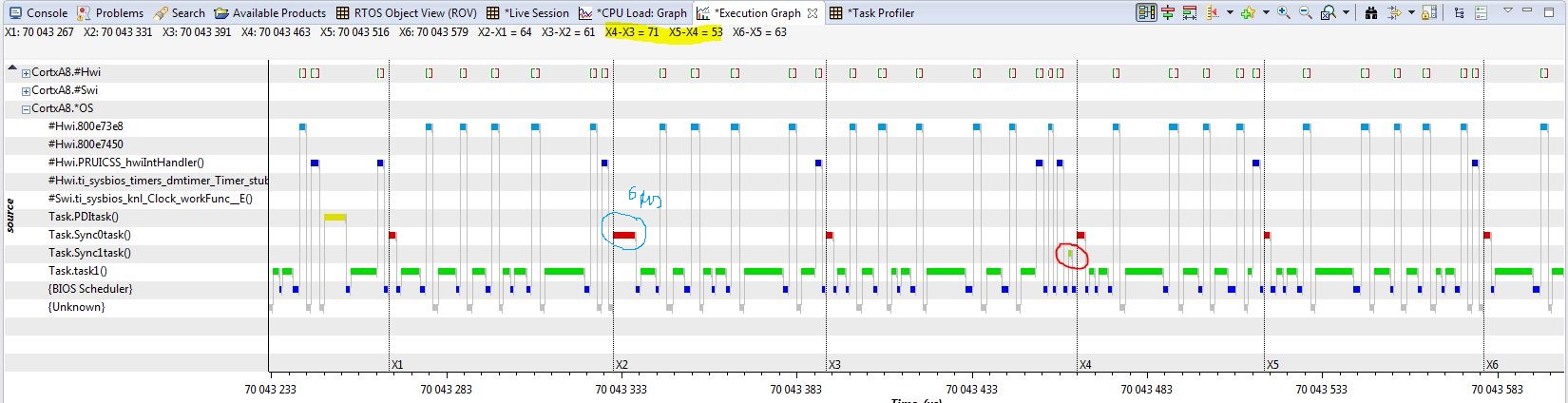
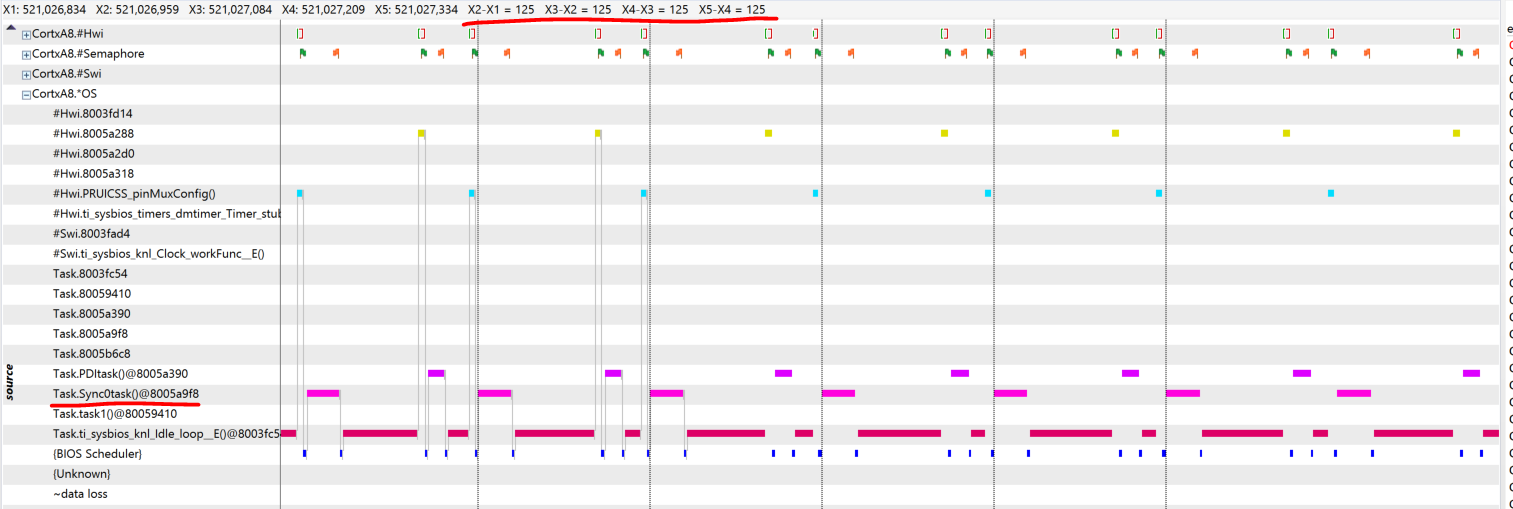
I have enabled the DC synchro with subordinated cycle: Sync0 cycle time is 62.5us/ Sync1 cycle time is 500us.
I have made several test on Sync0 jitter which should be very little in this configuration and the reseults are awful : I have a jitter of +- 10us which is horrible for us !
Can someone explain me this jitter and how to do to reduce it a lot ?
Thanks for your help.
Laurence