Part Number: AM3354
Tool/software: Linux
Hi:
i'm using AM3354 for a while and we had many different products designed based on this MCU.
we used CAN communication a lot and most of the product it seems fine.But still there are times that newly designly board run into strange CAN transmition problems.BSP stays the same as always.
right now we have a product of the hardware schematic version 1.0. The CAN is working fine.
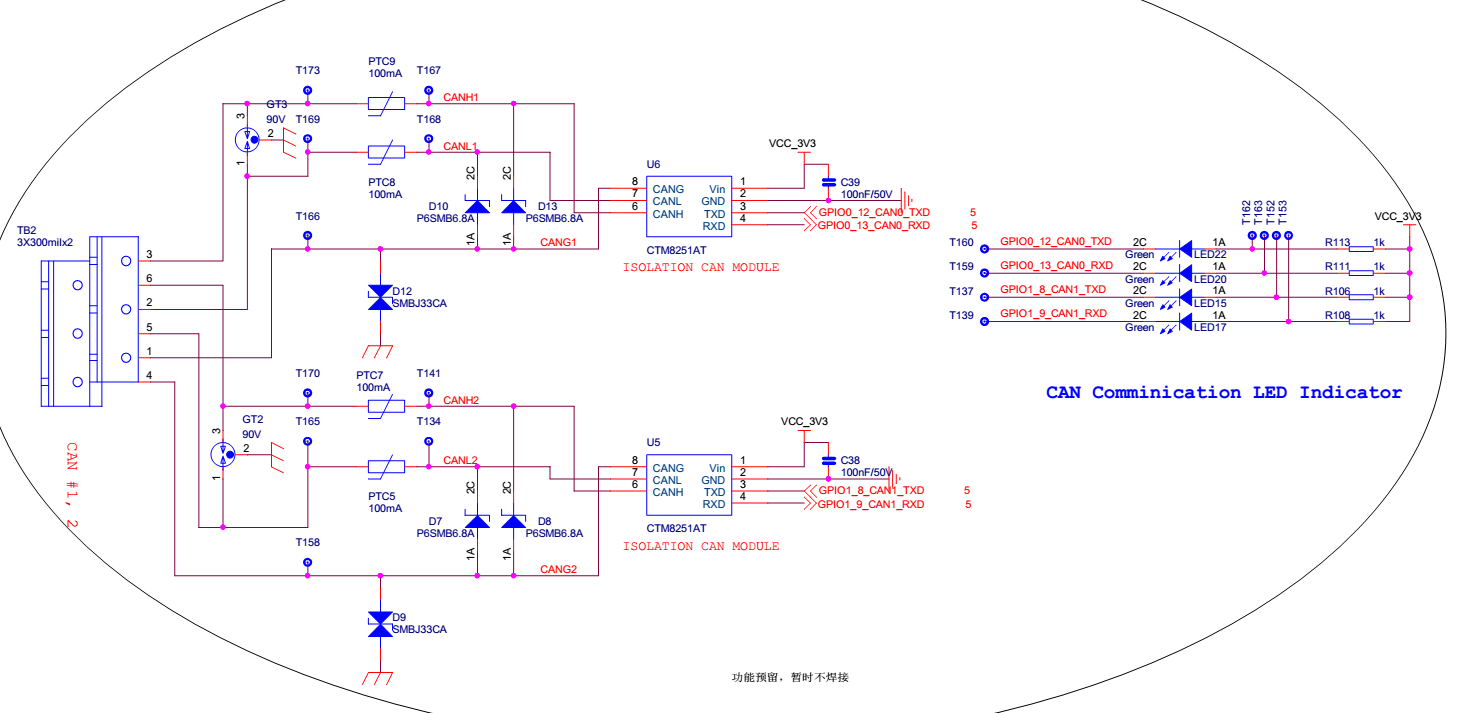
I'm attaching the schematic here.
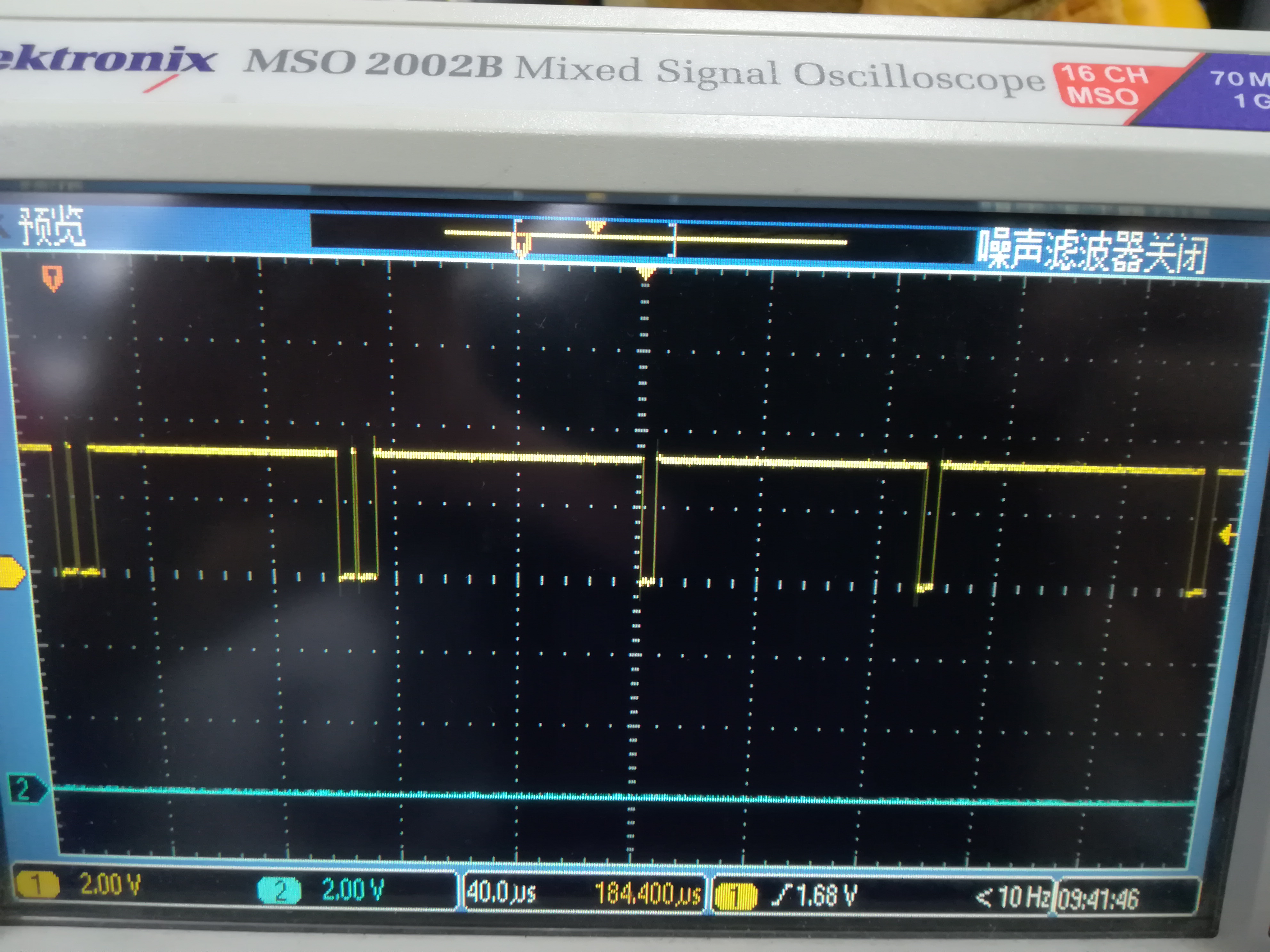
and when we tried to transmit a CAN frame. The wave looks ok.we are not connecting the CAN to somewhere else so the CAN bus is disconnected from any other node.That's why you can see the constant retrying by CAN controller hardware within MCU.
The command lines are:
canconfig can0 bitrate 50000 ctrlmode triple-sampling on
canconfig can0 start
cansend can0 -i 0x10 0x51
we are sending the data of value 0x51.
and the wave look like this:

Now.Here is the weird part.
On the same product but the next version of hardware which is 1.1. The CAN transmit strange wave no matter what i wanted to send.And the receiver of course can't get anything right.
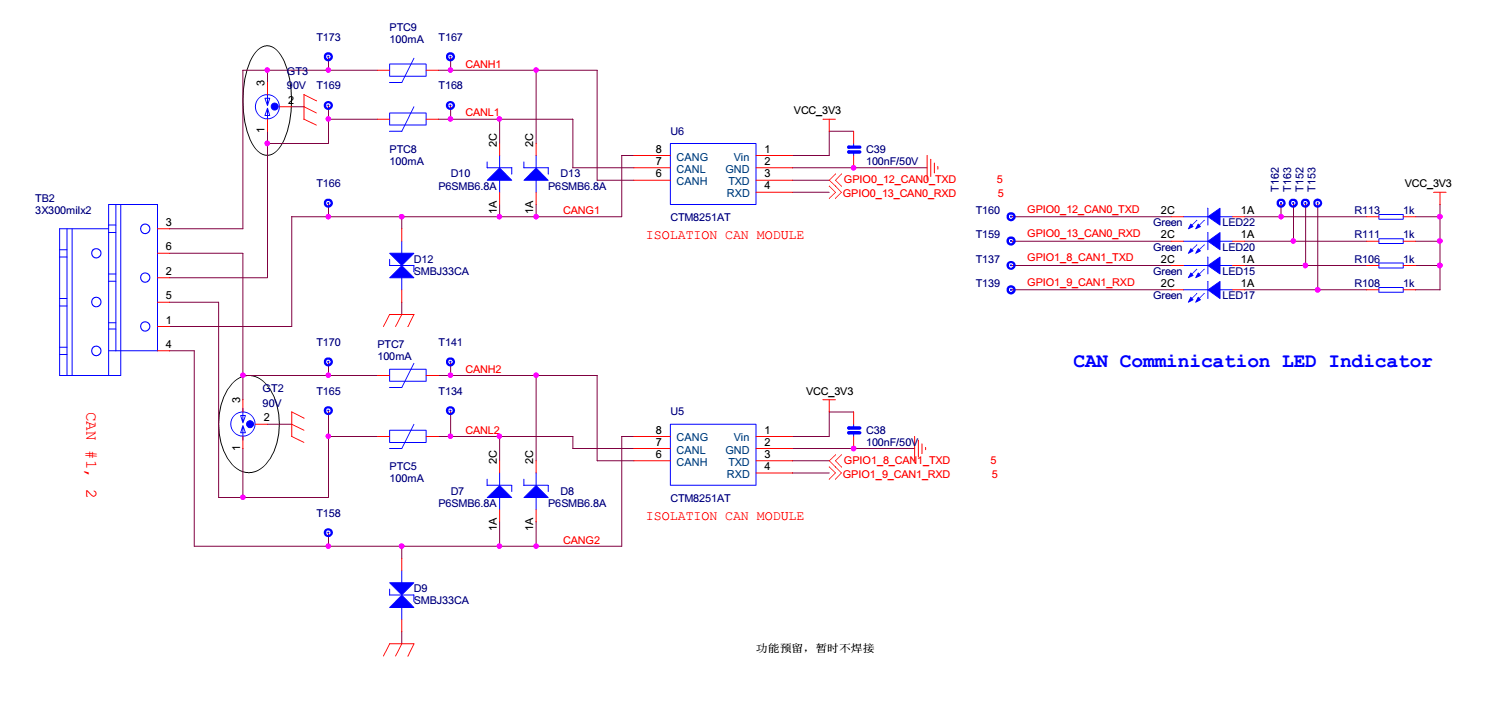
I'm attaching the schematic of 1.1 hardware here.But in actual you can see it's the same as 1.0 hardware.
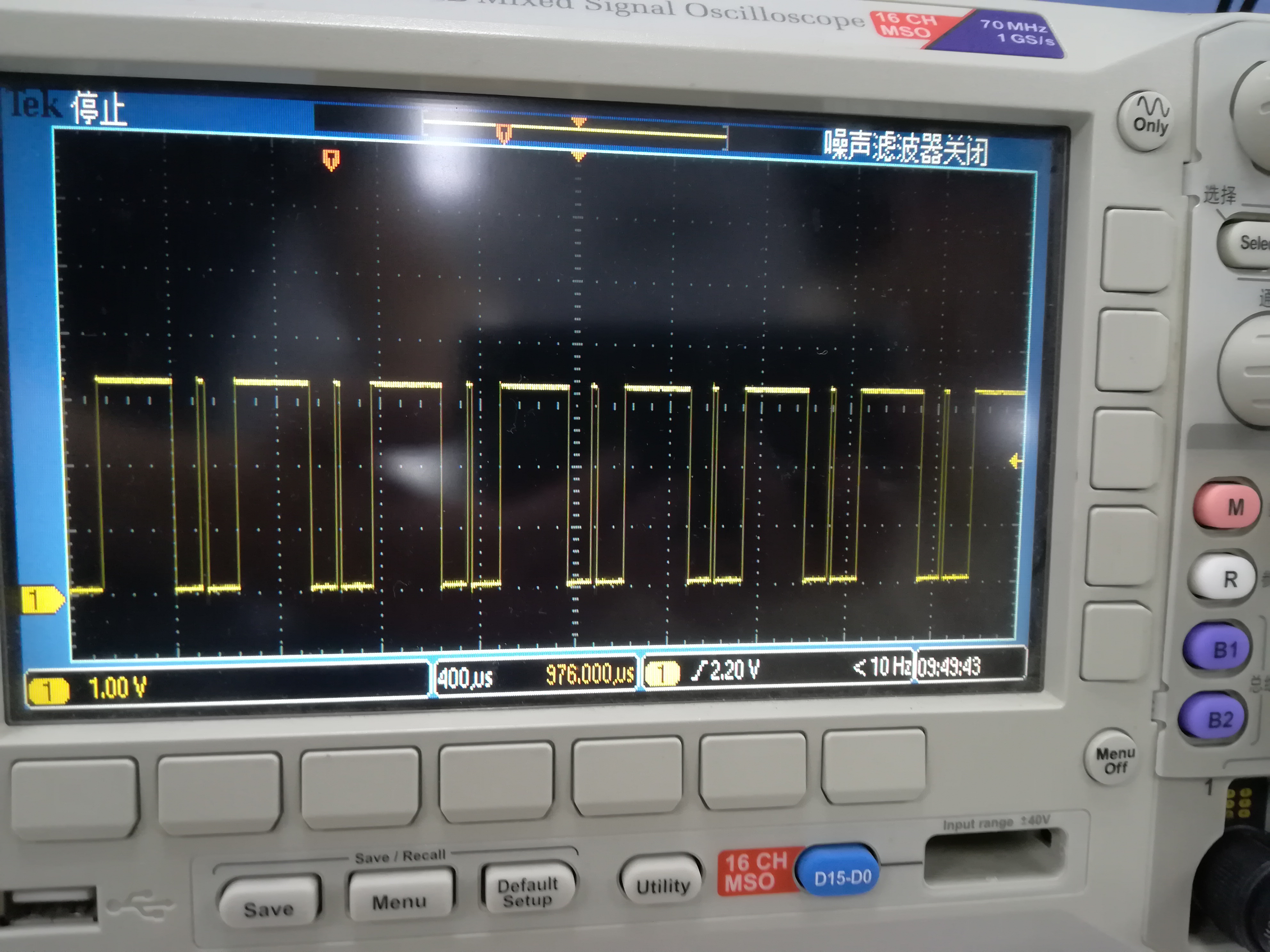
and when we tried to transmit a CAN frame. The wave looks strange.we are not connecting the CAN to somewhere else so the CAN bus is disconnected from any other node.That's why you can see the constant retrying by CAN controller hardware within MCU.
The command lines are also the same:
canconfig can0 bitrate 50000 ctrlmode triple-sampling on
canconfig can0 start
cansend can0 -i 0x10 0x51
we are sending the data of value 0x51.
and the bad wave look like this:
The strange part is the BSP is 100% not changed between hardware 1.0 and 1.1
and at least the schematic of 1.0 and 1.1 regarding CAN functionality is also the same.
Can you guys help me?
thanks a lot in advance.
yandong