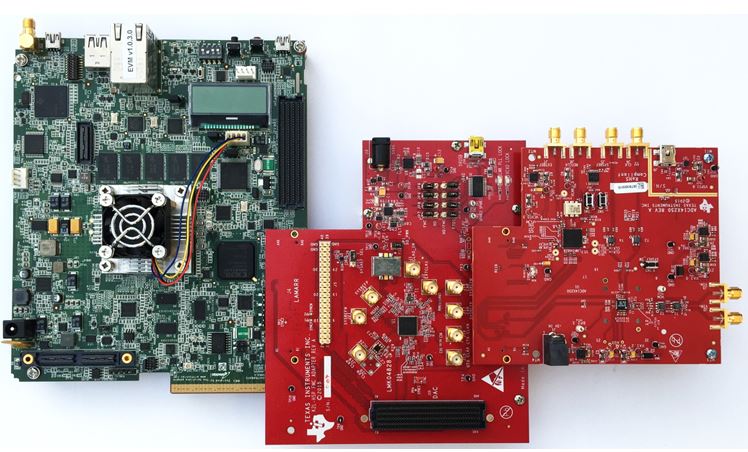
Part Number: 66AK2L06
Other Parts Discussed in Thread: RFSDK, TCI6630K2L, DAC38J84, , ADC14X250, ADC14X250EVM
Tool/software: Linux
How to find mcsdk ubifs image file named “k2l-evm-ubifs.ubi” for 66ak2l evm.
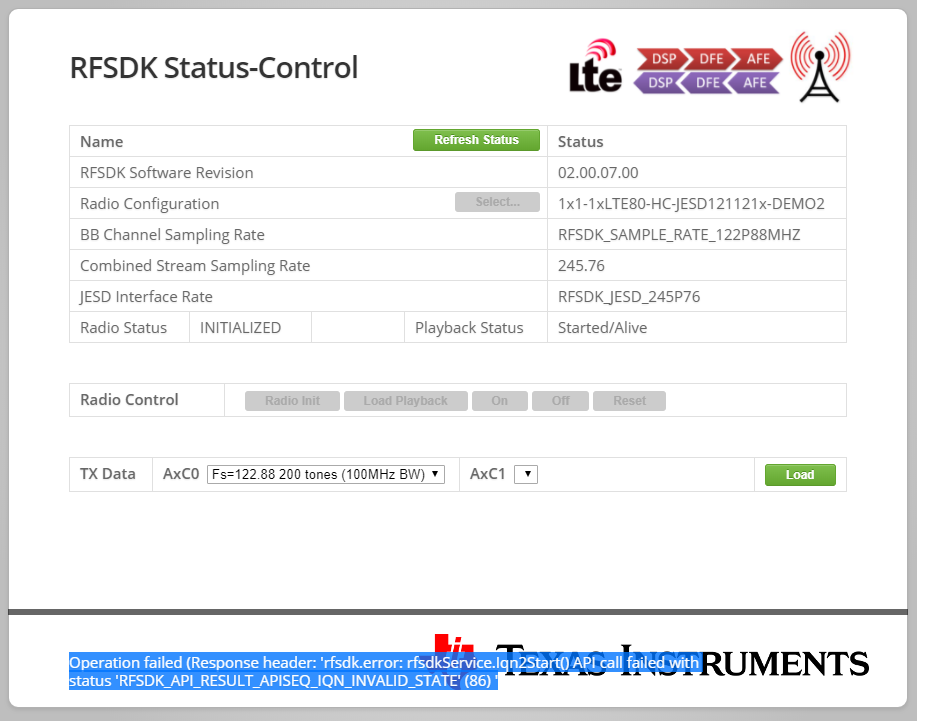
How to fix the following error ; ( we want to run demo2 for radio configuration 1x1-1xLTE80-HC-JESD121121x-DEMO2 )
root@k2l-evm:~# radio init
Traceback (most recent call last):
File "/usr/bin/radio", line 108, in <module>
command.onecmd(' '.join(sys.argv[1:]))
File "/usr/lib/python2.7/cmd.py", line 221, in onecmd
return func(arg)
File "/usr/lib/python2.7/rfsdk/command.py", line 1068, in do_init
self.radio.radio_init()
File "/usr/lib/python2.7/rfsdk/radio.py", line 262, in radio_init
self.dfe.dfe_reset()
File "/usr/lib/python2.7/rfsdk/platform/TCI6630K2L.py", line 460, in dfe_reset
res = self.rfsdkS.HwExceptionInit(req)
File "/usr/lib/python2.7/rfsdk/service.py", line 289, in HwExceptionInit
raise rfsdk.Error('rfsdkService.HwExceptionInit() API call failed with status %r (%d)' % (status, result,))
rfsdk.Error: rfsdkService.HwExceptionInit() API call failed with status 'RFSDK_API_RESULT_ERROR' (1)