


Part Number: TDA2EG
Hi
I am working on the 2D surround view usecase, and have a question about geometric alignment.
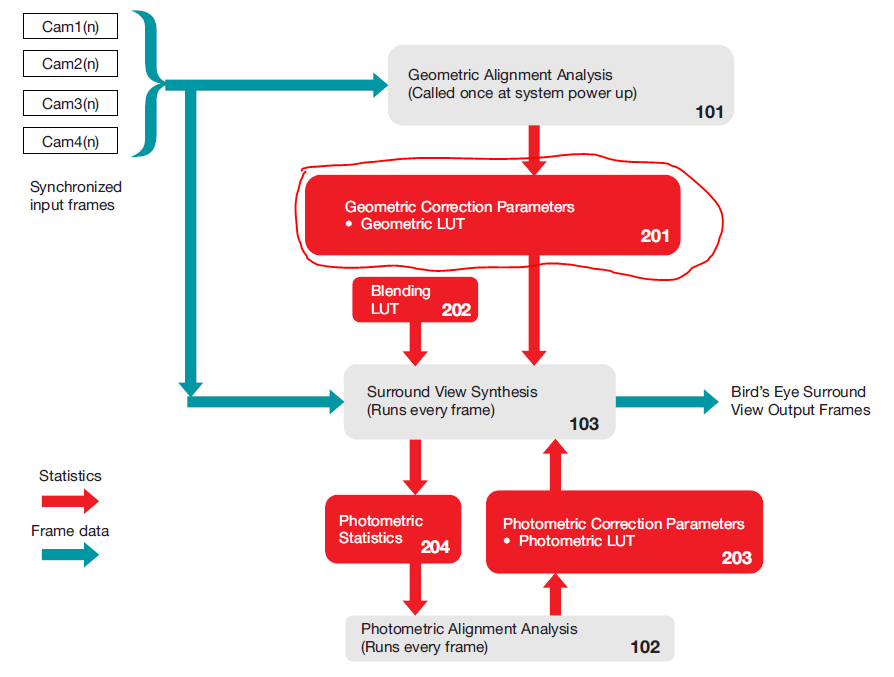
From the related docs, "geometric alignment function (block 101) is called only once by the system framework when the system is powered up, and generate the geometric LUT, then save it in the memory"
So i think the main purpose of geometric alignment is to obtain the geometric LUT at a "on-line" mode.
During the calibration of 2D surround view, we will use the vision_sdk\apps\tools\surround_vision_tools\2d_calibration_tool\surroundview\SurroundView.exe to generate the geometric LUT. Then we can update the GAlignLUT array of VSDK to use the newest calibration result. I think this is a "off-line" mode to obtain the geometric LUT.
My question is that if we already have the "off-line" mode to generate the geometric LUT by calibration, why we still need to use the "on-line" mode geometric alignment function in the usecase of 2D surround view? I think their purposes are the same, is it a repetition?
Thanks
xuanbo
