


Hello,
I'm running some test/basis code, which simply tries to regenerate a UART Rx interrupt, in response to an incoming Modbus poll message across the wire (8 bytes every 200 msec). However, I only get one Rx interrupt, then no more, even though the UART registers imply that another interrupt is needed - LSR has the READY bit set, plus IIR indicates a PEND (either RLS or or RDA, depending on the run). I clear out the event each time, in the UART interrupt, plus read the RBR, so that should set things up for the next interrupt?
extern "C" void hwi_fxn_uart( void )
{
( (evt_reg_1 *)ADDR_EVTCLR1 )->EVTCLR1 = EVT_EF_46;
uint8_t buf = ( (uart_regs_t *)UART_1 )->RBR;
}
It's a sparse interrupt processing, because I'm simply trying to get to a point that the interrupt is generated each time, before putting in the post-processing.
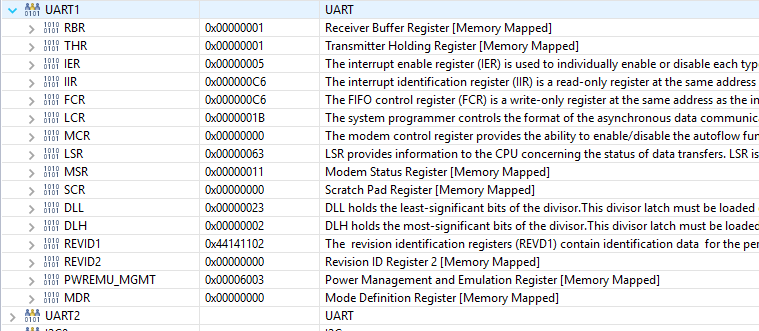
Below is a picture of my UART-related register settings
Any ideas why the interrupt is not being re-generated, would be appreciated.
Regards,
Robert




