


Part Number: TDA2PXEVM
Tool/software: TI-RTOS
HI,
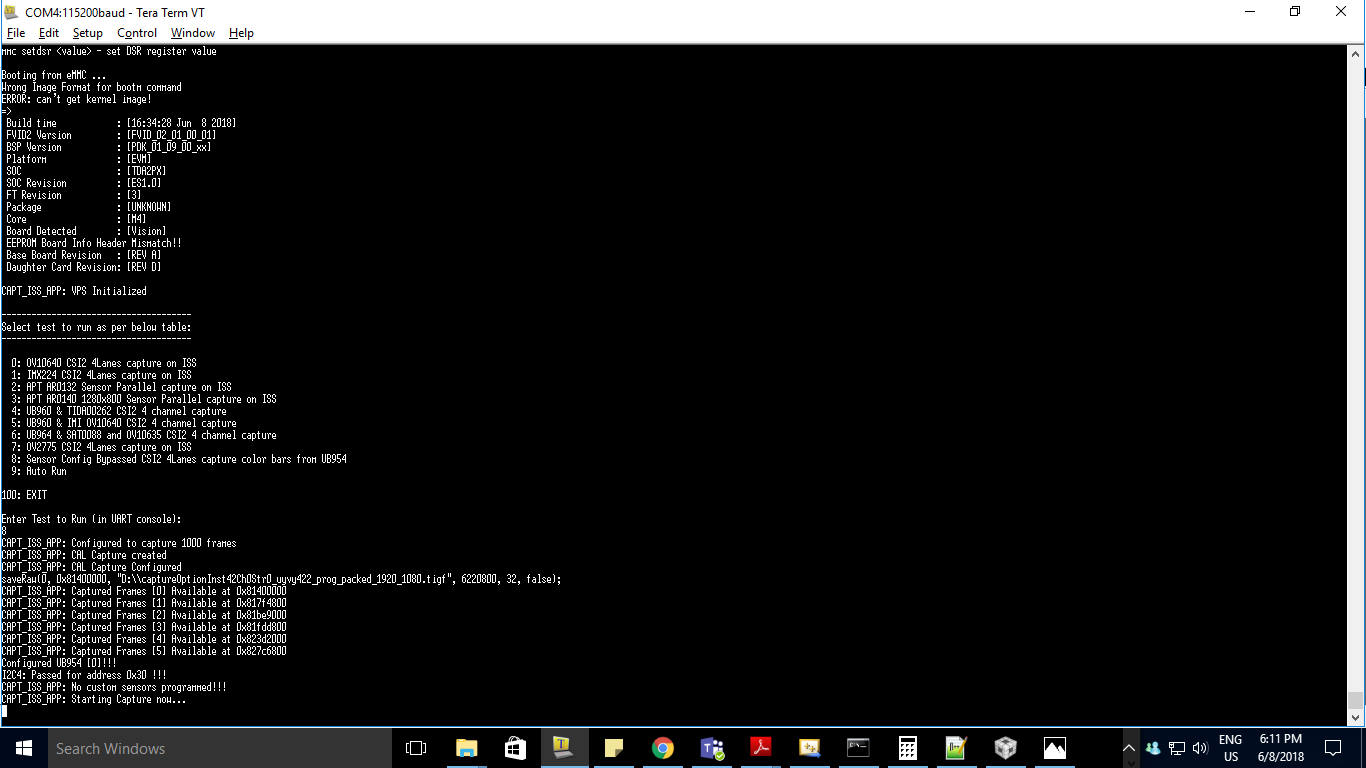
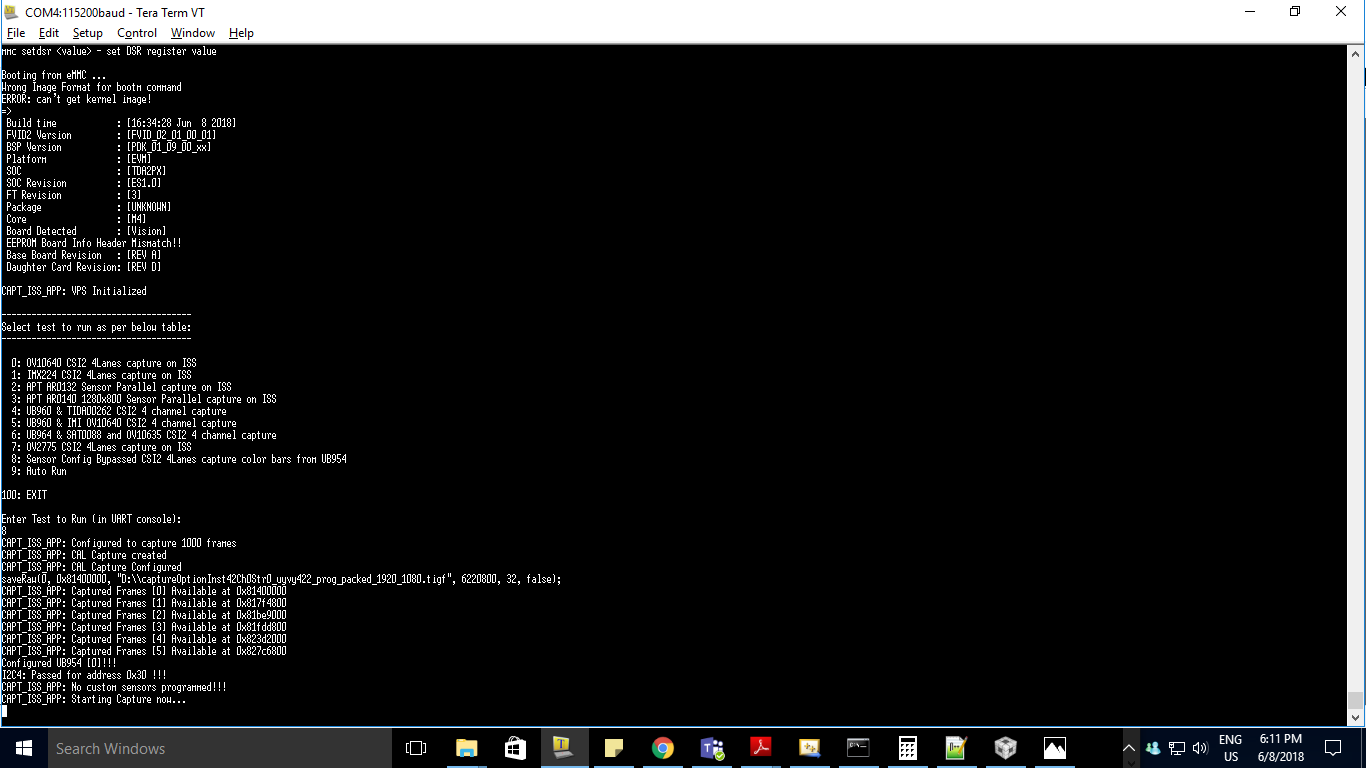
I am trying to generate test pattern on TDA2px EVM with DS90UB954 EVM. I have added iss_capture_null use case for the same. I am storing the o/p in raw format. I am getting black image.
I was referring "e2e.ti.com/.../683940
1) Sensor configuration --> is this ok?
info->dataFormat = SYSTEM_DF_RGB24_888;
info->bpp = SYSTEM_BPP_BITS8;
callback API's for sensor, I put empty.
2) In sensor interface info, I have added below. is that ok?
{SENSOR,
{
4u, /* I2C Instance id for the sensor */
{0x36}, /* I2C Address of the sensor */
{0x18}, /* I2C Address of the serializer */
FALSE, /* Flag for single/multi channel sensor config */
SYSTEM_VIFW_4LANES, /* Interface width */
SYSTEM_VIFM_SCH_CSI2, /* Video Interface mode - Single channel capture via CSI2 interface */
SYSTEM_CSI2_RGB888, /* Input CSI2 Data Format */
0, /* Virtual Channel Id */
0, /* Is CSI Enable Required in UB954 */
{TRUE /* isCplxCfgValid */,
{{FALSE, 1}, /* Clock Lane */
{FALSE, 2}, /* data1Lane */
{FALSE, 3}, /* data2Lane */
{FALSE, 4}, /* data3Lane*/
{FALSE, 5}},/* data4Lane */
400 /* csi2PhyClk */ },
19999, /* sensorDrvId */
FALSE, /* sensorBroadcast */
FALSE}}, /* enableFsin */
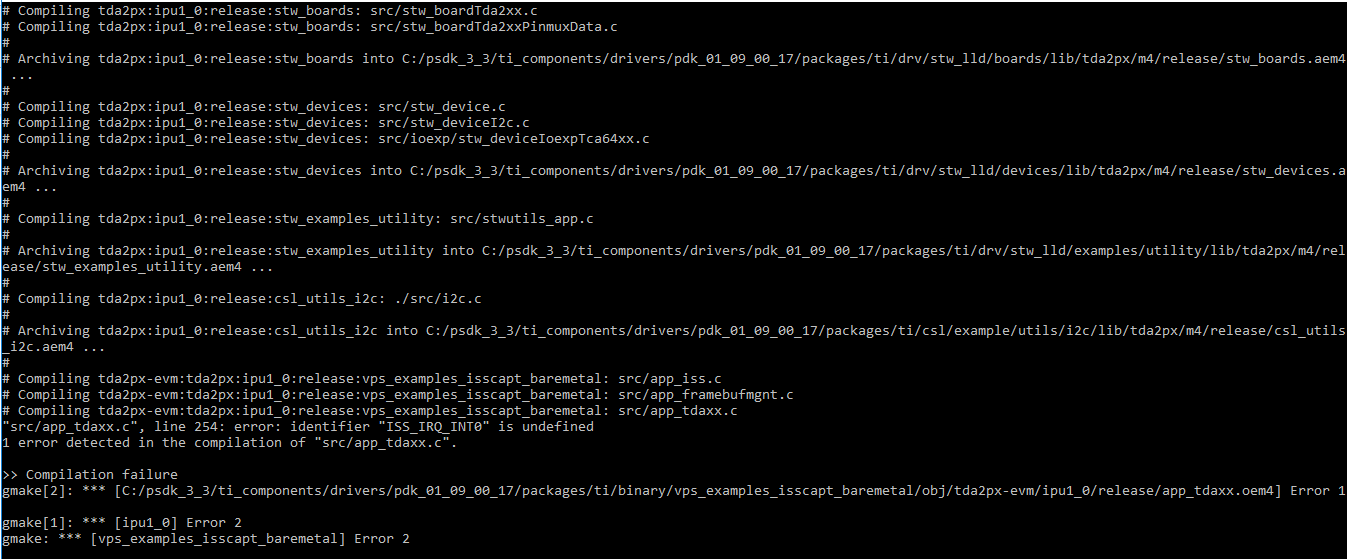
3) I have added support for SYSTEM_CSI2_RGB888 in issCaptureLink_drv.c like below, Is that correct.
case SYSTEM_CSI2_RGB888:
drvCalCfg->pixProcCfg[strmId].extract = VPS_ISS_CAL_PIX_EXRCT_B8;
drvCalCfg->pixProcCfg[strmId].pack = VPS_ISS_CAL_PIX_PACK_B8;
4) I had put breakpoint in function "IssCaptureLink_drvProcessData()" function, It is not hitting there. Am I missing something?
Thanks,
Swati



{kind=link}
{kind=link}
{kind=link}
{kind=link}