


Part Number: AM3358
Other Parts Discussed in Thread: SYSBIOS
Customer report call UART_printf() output float point data, system will hung after a while, ,code as below. message as upper snapshot. if remove the log(message) from below code, it won't hung. except the sysbios tick time, no other interrupt in the system.
please help to analysis.
While(1)
for(i=0;i < 128;++i)
{
sprintf(message, "%s:%03d A:%9.4f B:%9.4f C:%9.4f\n",getName(),i,
(INT16)( PHA[i])*220.0/4096,
(INT16)( PHB[i])*220.0/4096,
(INT16)( PHC[i])*220.0/4096);
log(message);// here it is UART_printf();
}
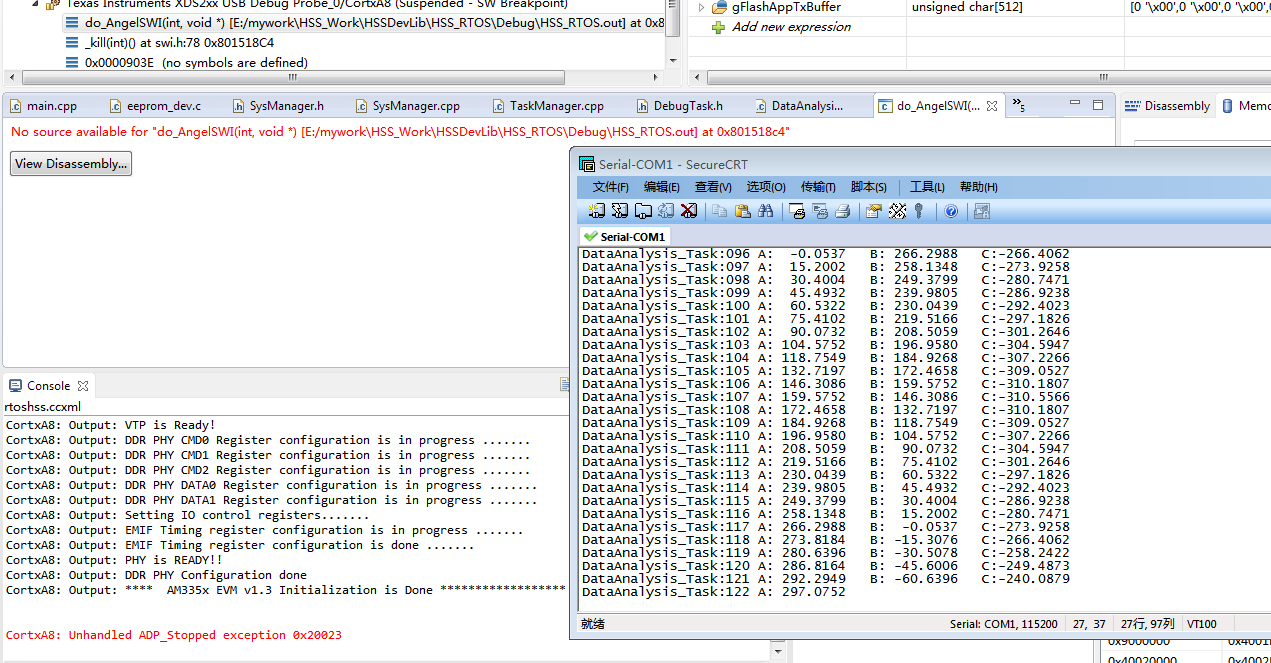
system usually report below error, what it denotes?
No source available for "do_AngelSWI(int, void *) at 0x80168ad0"
CortxA8: Unhandled ADP_Stopped exception 0x20023
Customer also report the UART_printf is slower than Linux UART console output, why and how to improve the speed?
background: CCS version: V7.2, BIOS version: bios_6_46_05_55,






