Part Number: OMAP-L138
Other Parts Discussed in Thread: OMAPL138
I have custom board and use SDK RTOS 05.02.00.10.
I successful run McBSP PDK example on my board but I can't set data delay on TX. When I modify dataDelay in mcbspChanConfigTx it's not influence to output on pins.
I checked McBSP registers. It seems like correct.
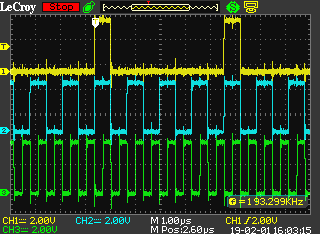
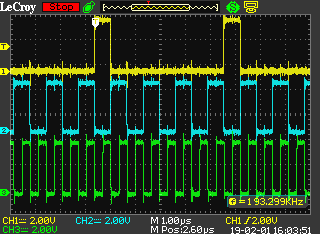
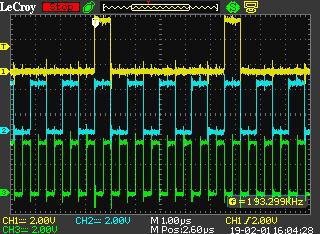
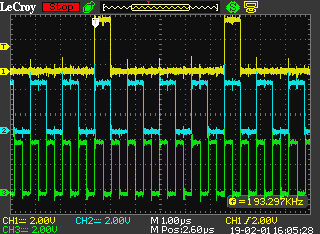
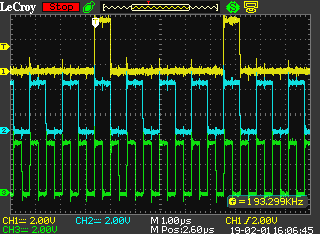
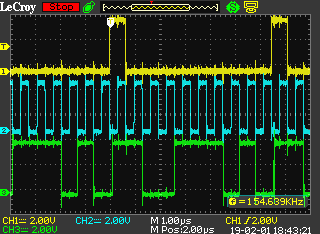
See signals on the pins FSX1, CLKX1, DX1 in attached pictures below.
Number of TX data bits remains constant regardless XDATDLY bits in XCR register.
My modified McBSP example code:
/*
* mcbspMasterDigLpbk.c
*
* This file contains the test / demo code to demonstrate the McBSP driver
* master functionality using Digital Loopback setup. The file configures
* the EVM in master mode.
*
* Copyright (C) 2018 Texas Instruments Incorporated - http://www.ti.com/
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/* ========================================================================== */
/* INCLUDE FILES */
/* ========================================================================== */
#include <ti/sysbios/BIOS.h>
#include <xdc/std.h>
#include <ti/sysbios/knl/Task.h>
#include <ti/sysbios/knl/Semaphore.h>
#include <string.h>
#include <ti/sysbios/knl/Queue.h>
#include <xdc/runtime/System.h>
#include <xdc/cfg/global.h>
/* Include EDMA3 Driver */
#include <ti/sdo/edma3/drv/edma3_drv.h>
/* CSL Chip Functional Layer */
//#include <ti/csl/csl_chip.h>
/* CSL Cache Functional Layer */
//#include <ti/csl/csl_cacheAux.h>
/* CSL CPINTC Include Files. */
//#include<ti/csl/csl_cpIntc.h>
/* MCBSP Driver Include File. */
#include <ti/drv/mcbsp/mcbsp_drv.h>
#include <ti/drv/mcbsp/mcbsp_osal.h>
#include <board.h>
#include <MCBSP_log.h>
/* PlatformLib Include File */
//#include <ti/platform/platform.h>
//added {
#include <ti/csl/csl_syscfg.h>
#include <ti/csl/csl_psc.h>
#include <ti/csl/csl_pscAux.h>
static void _Board_configGpioPinMux(void);
void _Board_moduleClockEnable(uint32_t module);
void _AllPscEnable(void);
//added }
/* ========================================================================== */
/* EXTERNAL FUNCTIONS */
/* ========================================================================== */
extern EDMA3_DRV_Handle edma3init(unsigned int edma3Id, EDMA3_DRV_Result *);
extern void McbspDevice_init(void);
extern int32_t Osal_dataBufferInitMemory(uint32_t dataBufferSize);
extern void McbspXmtInterrupt_init(void *mcbspTxChan);
extern void McbspRcvInterrupt_init(void *mcbspRxChan);
extern Board_STATUS Board_init(Board_initCfg);
/* FPGA Configuration Misc-1 Register offset */
#define MCBSP_FPGA_MISC_REG_OFFSET (0x0C)
/* ========================================================================== */
/* MACRO DEFINTIONS */
/* ========================================================================== */
#define NUM_BUFS 2 /* Max of buffers used in each direction */
#define FRAMESIZE (1024*8) /* e.g 5 ms 8 KHz samples */
#define NUM_OF_ENABLED_CHANNELS 1 /* Number of slots to be used */
#define NUM_OF_MAX_CHANNELS 1 /* Maximum number of time slots available based on clock settings */
#define BUFSIZE (NUM_OF_ENABLED_CHANNELS * FRAMESIZE) /* Total buffer size per frame */
/* Defines the core number responsible for system initialization. */
#define CORE_SYS_INIT 1
/* Number of iterations to execute test: Only applicable to INTERNAL CLOCK Loopback test */
#define NUM_OF_ITERATIONS 1000000
/* Number of MCBSP Frame structures used for submit channel */
#define NUM_OF_MCBSP_FRAMES 2
/* Number of buffers initially submitted to Mcbsp lld: Only applicable to
External clock test ; Note: This should be set to 2*/
#define INIT_SUBMIT_Q_CNT 2
/*============================================================================*/
/* GLOBAL VARIABLES */
/*============================================================================*/
/* Shared Memory Variable to ensure synchronizing MCBSP initialization
* with all the other cores. */
/* Created an array to pad the cache line with MCBSP_CACHE_LENGTH size */
#pragma DATA_ALIGN (isMCBSPInitialized, MCBSP_MAX_CACHE_ALIGN)
#pragma DATA_SECTION (isMCBSPInitialized, ".mcbspSharedMem");
volatile Uint32 isMCBSPInitialized[(MCBSP_CACHE_LENGTH / sizeof(Uint32))] = { 0 };
/* Handle to the EDMA driver instance */
#pragma DATA_ALIGN (hEdma, MCBSP_MAX_CACHE_ALIGN)
EDMA3_DRV_Handle hEdma[(MCBSP_CACHE_LENGTH / sizeof(EDMA3_DRV_Handle))] = { NULL };
/* Handle to MCBSP driver instance */
typedef void* Mcbsp_DevHandle;
Mcbsp_DevHandle hMcbspDev;
/* Handle to MCBSP driver channel instance */
typedef void* Mcbsp_ChanHandle;
Mcbsp_ChanHandle hMcbspTxChan;
Mcbsp_ChanHandle hMcbspRxChan;
/* Core Number Identifier */
UInt32 coreNum = 0xFFFF;
/* Array to hold the pointer to the allocated buffers */
void* bufRx[NUM_BUFS];
void* bufTx[NUM_BUFS];
#ifdef MCBSP_LOOP_PING_PONG
/* Ping pong buffers used to submit to Mcbsp lld, which will be used in a loop */
void* bufRxPingPong[INIT_SUBMIT_Q_CNT];
void* bufTxPingPong[INIT_SUBMIT_Q_CNT];
#endif
/* Global Error call back function prototype */
void mcbsp_GblErrCallback(uint32_t chanHandle,uint32_t spcr_read,uint32_t Arg3);
/* Variables to indicate status of EDMA TX and RX requests */
volatile uint32_t edmaTxDone = 0;
volatile uint32_t edmaRxDone = 0;
/* Global variables to track number of buffers submitted, number of iterations, error counts etc */
int rxSubmitCount=0, txSubmitCount=0;
uint32_t num_iterations=0;
uint32_t num_rx_Call_backs=0, num_tx_Call_backs=0, dummy_call_backs=0;
uint32_t rxunderflowcnt=0, txunderflowcnt=0;
uint32_t errBuffCount=0;
/* Debug variables */
volatile int debugVar=1; /* This can be used to maintain a while loop, If set to 0 will exit loop */
volatile int debugCommand=0; /* This can be used to set to value below to send command to restart channel */
#define DEBUG_COMMAND_RESTART_CHANNELS 1
/**
* \brief Mcbsp Sample rate generator default parameters.
*
*/
Mcbsp_srgConfig mcbspSrgCfg =
{
FALSE, /* No gsync to be used as input is not CLKS */
Mcbsp_ClkSPol_RISING_EDGE, /* Dont care as input clock is not clks */
Mcbsp_SrgClk_CLKCPU, /* McBSP internal clock to be used */
150000000, //12288000, /* Mcbsp internal clock frequency(PLL-SYSCLK6) */
0 /* frame sync pulse width (val+1) is used */
};
/**
* \brief Mcbsp device creation default parameters.
*
*/
const Mcbsp_Params Mcbsp_PARAMS =
{
Mcbsp_DevMode_McBSP, /* Use the device as MCBSP */
Mcbsp_OpMode_DMAINTERRUPT, /* Use DMA mode of operation */
TRUE, /* cache coherency taken care of by driver */
Mcbsp_EmuMode_SOFT_ABORT, /* Emulation mode free is to be enabled */
#ifdef MCBSP_EXTERNAL_CLOCK
Mcbsp_Loopback_DISABLE, /* Loop back mode disabled */
#else
Mcbsp_Loopback_DISABLE, /* Loop back mode enabled */
#endif
&mcbspSrgCfg, /* sample rate generator configuration */
NULL, /* TX pending buffer queue from application */
NULL, /* TX floating buffer queue in DMA */
NULL, /* RX pending buffer queue from application */
NULL /* RX floating buffer queue in DMA */
};
#pragma DATA_ALIGN(loopTxJob, MCBSP_MAX_CACHE_ALIGN)
static Int32 loopTxJob[16] = {
/* Filling with Mu law silence pattern : Can be any user defined pattern */
0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f,
0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f, 0x7f7f7f7f
};
//#pragma DATA_ALIGN(loopRxJob, MCBSP_MAX_CACHE_ALIGN)
//static Int32 loopRxJob[16] = {
// 0, 0, 0, 0, 0, 0, 0, 0,
// 0, 0, 0, 0, 0, 0, 0, 0
//};
/**< settings to configure the TX or RX hardware sections */
Mcbsp_DataConfig mcbspChanConfigTx =
{
Mcbsp_Phase_SINGLE,
Mcbsp_WordLength_8,
Mcbsp_WordLength_8, /* Dont care for single phase*/
NUM_OF_MAX_CHANNELS,
NUM_OF_MAX_CHANNELS, // Only used with dual phase
Mcbsp_FrmSync_DETECT,
#ifdef MCBSP_EXTERNAL_CLOCK
Mcbsp_DataDelay_0_BIT,
#else
Mcbsp_DataDelay_1_BIT,
#endif
Mcbsp_Compand_OFF_MSB_FIRST,
Mcbsp_BitReversal_DISABLE,
Mcbsp_IntMode_ON_SYNCERR,
Mcbsp_RxJust_RZF, /* Dont care for TX */
Mcbsp_DxEna_OFF
};
/**< settings to configure the TX or RX hardware sections */
//Mcbsp_DataConfig mcbspChanConfigRx =
//{
// Mcbsp_Phase_SINGLE,
// Mcbsp_WordLength_16,
// Mcbsp_WordLength_8, /* Dont care for single phase*/
// NUM_OF_MAX_CHANNELS,
// NUM_OF_MAX_CHANNELS, // Only used with dual phase
// Mcbsp_FrmSync_DETECT,
//#ifdef MCBSP_EXTERNAL_CLOCK
// Mcbsp_DataDelay_0_BIT,
//#else
// Mcbsp_DataDelay_0_BIT,
//#endif
// Mcbsp_Compand_OFF_MSB_FIRST,
// Mcbsp_BitReversal_DISABLE,
// Mcbsp_IntMode_ON_SYNCERR,
// Mcbsp_RxJust_RZF, /* Dont care for TX */
// Mcbsp_DxEna_OFF
//};
/**< clock setup for the TX section */
Mcbsp_ClkSetup mcbspClkConfigTx =
{
#ifdef MCBSP_EXTERNAL_CLOCK
Mcbsp_FsClkMode_EXTERNAL,
192000, /* 8KHz */
Mcbsp_TxRxClkMode_EXTERNAL,
#else
Mcbsp_FsClkMode_INTERNAL,
192000, /* 192KHz */
Mcbsp_TxRxClkMode_INTERNAL,
#endif
Mcbsp_FsPol_ACTIVE_HIGH,
Mcbsp_ClkPol_RISING_EDGE
};
/**< clock setup for the RX section */
//Mcbsp_ClkSetup mcbspClkConfigRx =
//{
//#ifdef MCBSP_EXTERNAL_CLOCK
// Mcbsp_FsClkMode_EXTERNAL,
// 192000, /* 8KHz */
// Mcbsp_TxRxClkMode_EXTERNAL,
//#else
// Mcbsp_FsClkMode_EXTERNAL,
// 192000, /* 8KHz */
// Mcbsp_TxRxClkMode_EXTERNAL,
//#endif
// Mcbsp_FsPol_ACTIVE_HIGH,
// Mcbsp_ClkPol_FALLING_EDGE
//};
/**< Multi channel setup */
Mcbsp_McrSetup mcbspMultiChanCtrl =
{
Mcbsp_McmMode_ALL_CHAN_DISABLED_UNMASKED,
Mcbsp_PartitionMode_CHAN_0_15,
Mcbsp_PartitionMode_CHAN_16_31,
Mcbsp_PartitionMode_2
};
Mcbsp_ChanParams mcbspChanparamTx =
{
Mcbsp_WordLength_8, /* wordlength configured */
&loopTxJob[0], /* loop job buffer internal */
8, /* user loopjob length */
mcbsp_GblErrCallback, /* global error callback */
NULL, /* edma Handle */
1, /* EDMA event queue */
8, /* hwi number */
Mcbsp_BufferFormat_1SLOT,
TRUE, /* FIFO mode enabled */
&mcbspChanConfigTx, /* channel configuration */
&mcbspClkConfigTx, /* clock configuration */
&mcbspMultiChanCtrl, /* multi channel control */
0x0001, /* Enabled timeslots: 0, 4, 5, 8, 10, 12, 13, 14 */
0x00,
0x00,
0x00,
NUM_OF_ENABLED_CHANNELS /* Total number of channels enabled*/
};
//Mcbsp_ChanParams mcbspChanparamRx =
//{
// Mcbsp_WordLength_16, /* wordlength configured */
// &loopRxJob[0], /* loop job buffer internal */
// 8, /* user loopjob length */
// mcbsp_GblErrCallback, /* global error callback */
// NULL, /* edma Handle */
// 1, /* EDMA event queue */
// 8, /* hwi number */
// Mcbsp_BufferFormat_1SLOT,
// TRUE, /* FIFO mode enabled */
// &mcbspChanConfigRx, /* channel configuration */
// &mcbspClkConfigRx, /* clock configuration */
// &mcbspMultiChanCtrl, /* multi channel control */
// 0x0001, /* Enabled timeslots: 0, 4, 5, 8, 10, 12, 13, 14 */
// 0x00,
// 0x00,
// 0x00,
// NUM_OF_ENABLED_CHANNELS /* Total number of channels enabled*/
//};
/* ========================================================================== */
/* FUNCTION DEFINITIONS */
/* ========================================================================== */
/*
* This is the application's callback function. The driver will
* call this function whenever an EDMA I/O operation is over.
*
*/
void mcbspAppCallback(void* arg, Mcbsp_IOBuf *ioBuf)
{
int32_t mode;
int32_t *pmode = (int32_t *)arg;
mode = *pmode;
if (mode == MCBSP_MODE_OUTPUT)
{
if(ioBuf) {
num_tx_Call_backs++;
edmaTxDone = 1;
Semaphore_post(semTx);
}else
txunderflowcnt++;
}
else if (mode == MCBSP_MODE_INPUT)
{
if(ioBuf) {
num_rx_Call_backs++;
edmaRxDone = 1;
Semaphore_post(semRx);
}else
rxunderflowcnt++;
}else
dummy_call_backs++;
return;
}
/*
* This is the application's Global error callback function
*/
void mcbsp_GblErrCallback(uint32_t chanHandle,uint32_t spcr_read,uint32_t Arg3)
{
MCBSP_log ("Debug(Core %d): ERROR callback called SPCR: %x", coreNum, spcr_read);
}
/*
* \brief This function demostrates the use of Mcbsp using digital loopback
* communication setup.
*
* \param None
*
* \return None
*/
void mcbspDigLpbkApp(UArg arg0, UArg arg1)
{
/**< Mcbsp device params */
Mcbsp_Params mcbspParams;
/**< Queue to hold the pending packets received from the application */
Queue_Struct txQueuePendingList, rxQueuePendingList;
/**< Queue to manage floating packets in DMA */
Queue_Struct txQueueFloatingList, rxQueueFloatingList;
uint32_t count = 0, tempCount = 0;
int32_t status = 0, retval = 0;
int32_t txChanMode = MCBSP_MODE_OUTPUT;
int32_t rxChanMode = MCBSP_MODE_INPUT;
uint32_t mcbspTxDone = 0, mcbspRxDone = 0;
Mcbsp_IOBuf txFrame[NUM_OF_MCBSP_FRAMES], rxFrame[NUM_OF_MCBSP_FRAMES];
int txFrameIndex=0, rxFrameIndex=0;
int init_count=0;
#ifdef MCBSP_LOOP_PING_PONG
int pingPongIndex=0;
#endif
/* Initialize the OSAL */
if (Osal_dataBufferInitMemory(BUFSIZE) < 0)
{
MCBSP_log ("Debug(Core %d): Error: Unable to initialize the OSAL. \n", coreNum);
return;
}
/* update EDMA3 handle to channel parameters */
mcbspChanparamTx.edmaHandle = hEdma[0];
// mcbspChanparamRx.edmaHandle = hEdma[0];
/* create the pending and floating queue for the TX channel */
Queue_construct(&txQueuePendingList, NULL);
Queue_construct(&txQueueFloatingList, NULL);
/* create the pending and floating queue for the RX channel */
// Queue_construct(&rxQueuePendingList, NULL);
// Queue_construct(&rxQueueFloatingList, NULL);
mcbspParams = Mcbsp_PARAMS;
mcbspParams.txQPendingList = &txQueuePendingList;
mcbspParams.txQFloatingList = &txQueueFloatingList;
// mcbspParams.rxQPendingList = &rxQueuePendingList;
// mcbspParams.rxQFloatingList = &rxQueueFloatingList;
/* Bind the driver instance with device instance */
status = mcbspBindDev(&hMcbspDev, coreNum, &mcbspParams);
if (status != MCBSP_STATUS_COMPLETED)
{
MCBSP_log ("Debug(Core %d): MCBSP LLD Bind Device Failed\n", coreNum);
return;
}
/* If the user loopjob buffer is in local L2 memory: Convert into Global memory address space */
// if(mcbspChanparamRx.userLoopJobBuffer)
// mcbspChanparamRx.userLoopJobBuffer = (void *)Mcbsp_osalLocal2Global(mcbspChanparamRx.userLoopJobBuffer);
/* Create a RX channel for receiving */
// status = mcbspCreateChan(&hMcbspRxChan, hMcbspDev, MCBSP_MODE_INPUT, &mcbspChanparamRx, mcbspAppCallback, &rxChanMode);
// if (MCBSP_STATUS_COMPLETED != status)
// {
// MCBSP_log ("Debug(Core %d): Error: Create Channel (RX) failed\n", coreNum);
// return;
// }
/* If the user loopjob buffer is in local L2 memory: Convert into Global memory address space */
if(mcbspChanparamTx.userLoopJobBuffer)
mcbspChanparamTx.userLoopJobBuffer = Mcbsp_osalLocal2Global(mcbspChanparamTx.userLoopJobBuffer);
/* Create a TX channel for the transmission */
status = mcbspCreateChan(&hMcbspTxChan, hMcbspDev, MCBSP_MODE_OUTPUT, &mcbspChanparamTx, mcbspAppCallback, &txChanMode);
if (MCBSP_STATUS_COMPLETED != status)
{
MCBSP_log ("Debug(Core %d): Error: Create Channel (TX) failed\n", coreNum);
return;
}
/* Register mcbsp interrupts */
//McbspRcvInterrupt_init(hMcbspRxChan);
//McbspXmtInterrupt_init(hMcbspTxChan);
/* create the buffers required for the TX and RX operations */
for (count = 0; count < (NUM_BUFS); count++)
{
bufTx[count] = (uint8_t *)Osal_mcbspDataBufferMalloc(BUFSIZE);
// bufRx[count] = (uint8_t *)Osal_mcbspDataBufferMalloc(BUFSIZE);
if (bufTx[count] == NULL)
{
MCBSP_log ("Debug(Core %d): Error: Tx Buffer (%d) Memory Allocation Failed\n", coreNum, count);
return;
}
// if (bufRx[count] == NULL)
// {
// MCBSP_log ("Debug(Core %d): Error: Rx Buffer (%d) Memory Allocation Failed\n", coreNum, count);
// return;
// }
}
#ifdef MCBSP_LOOP_PING_PONG
/* create the ping pong buffers required for the TX and RX operations */
for (count = 0; count < (NUM_BUFS); count++)
{
bufRxPingPong[count] = (uint8_t *)Osal_mcbspDataBufferMalloc(BUFSIZE);
bufTxPingPong[count] = (uint8_t *)Osal_mcbspDataBufferMalloc(BUFSIZE);
if (bufTxPingPong[count] == NULL)
{
MCBSP_log ("Debug(Core %d): Error: Tx Ping pong Buffer (%d) Memory Allocation Failed\n", coreNum, count);
return;
}
if (bufRxPingPong[count] == NULL)
{
MCBSP_log ("Debug(Core %d): Error: Rx Ping pong Buffer (%d) Memory Allocation Failed\n", coreNum, count);
return;
}
}
#endif
/* Fill the buffers with known data and transmit the same and
check if the same pattern is received */
for (count = 0; count < (NUM_BUFS); count++)
{
memset((uint8_t *)bufTx[count], 0, BUFSIZE);
for (tempCount = 0; tempCount < BUFSIZE; tempCount++)
{
((uint8_t *)bufTx[count])[tempCount] = 0xAA;//(tempCount % 0x100);
}
}
MCBSP_log ("Debug(Core %d): If required to restart set debugCommand variable to %d\n", coreNum, DEBUG_COMMAND_RESTART_CHANNELS);
restart_mcbsp_point:
txFrameIndex=0;
rxFrameIndex=0;
init_count=0;
#ifdef MCBSP_EXTERNAL_CLOCK
/* Initial loading of ping ping buffers */
for(init_count =0 ; init_count < INIT_SUBMIT_Q_CNT; init_count++)
{
#ifdef MCBSP_LOOP_PING_PONG
memset((uint8_t *)bufRxPingPong[init_count], 0, BUFSIZE);
/* RX frame processing */
rxFrame[rxFrameIndex].cmd = Mcbsp_IOBuf_Cmd_READ;
rxFrame[rxFrameIndex].addr = (void*)bufRxPingPong[init_count];
#else
memset((uint8_t *)bufRx[init_count], 0, BUFSIZE);
/* RX frame processing */
rxFrame[rxFrameIndex].cmd = Mcbsp_IOBuf_Cmd_READ;
rxFrame[rxFrameIndex].addr = (void*)bufRx[init_count];
#endif
rxFrame[rxFrameIndex].size = BUFSIZE;
rxFrame[rxFrameIndex].arg = (uint32_t) hMcbspRxChan;
rxFrame[rxFrameIndex].status = MCBSP_STATUS_COMPLETED;
rxFrame[rxFrameIndex].misc = 1; /* reserved - used in callback to indicate asynch packet */
status = mcbspSubmitChan(hMcbspRxChan, (void *)&rxFrame[rxFrameIndex]);
if (status != MCBSP_STATUS_PENDING)
{
MCBSP_log ("Debug(Core %d): Error: RX buffer #%d submission FAILED\n", coreNum, init_count);
retval = 1;
}
else
{
#ifdef MCBSP_APP_VERBOSE
MCBSP_log ("Debug(Core %d): RX buffer #%d is submitted to MCBSP driver\n", coreNum, init_count);
#endif
}
rxFrameIndex++;
rxFrameIndex = (rxFrameIndex >= (NUM_OF_MCBSP_FRAMES)) ? 0 : rxFrameIndex;
rxSubmitCount++;
/* TX frame processing */
txFrame[txFrameIndex].cmd = Mcbsp_IOBuf_Cmd_WRITE;
#ifdef MCBSP_LOOP_PING_PONG
txFrame[txFrameIndex].addr = (void*)bufTxPingPong[init_count];
#else
txFrame[txFrameIndex].addr = (void*)bufTx[init_count];
#endif
txFrame[txFrameIndex].size = BUFSIZE;
txFrame[txFrameIndex].arg = (uint32_t)hMcbspTxChan;
txFrame[txFrameIndex].status = MCBSP_STATUS_COMPLETED;
txFrame[txFrameIndex].misc = 1; /* reserved - used in callback to indicate asynch packet */
status = mcbspSubmitChan(hMcbspTxChan, (void *)&txFrame[txFrameIndex]);
if (status != MCBSP_STATUS_PENDING)
{
MCBSP_log ("Debug(Core %d): Error: TX buffer #%d submission FAILED\n", coreNum, init_count);
retval = 1;
}
else
{
#ifdef MCBSP_APP_VERBOSE
MCBSP_log ("Debug(Core %d): TX buffer #%d submission is submitted to MCBSP driver\n", coreNum, init_count);
#endif
}
txFrameIndex++;
txFrameIndex = (txFrameIndex >=(NUM_OF_MCBSP_FRAMES)) ? 0 : txFrameIndex;
txSubmitCount++;
}
/* Wait for TX and RX processing to complete */
while (1)
{
if (edmaTxDone == 1)
{
#ifdef MCBSP_APP_VERBOSE
MCBSP_log ("Debug(Core %d): EDMA -> Iteration-%d frames are transmitted to TX path\n", coreNum, count);
#endif
edmaTxDone = 0; /* Reset for next iteration */
mcbspTxDone = 1;
}
if (edmaRxDone == 1)
{
#ifdef MCBSP_APP_VERBOSE
MCBSP_log ("Debug(Core %d): EDMA -> Iteration-%d frames are received from RX path\n", coreNum, count);
#endif
edmaRxDone = 0; /* Reset for next iteration */
mcbspRxDone = 1;
}
if ((mcbspTxDone == 1) && (mcbspRxDone == 1))
{
mcbspTxDone = 0; /* Reset for next iteration */
mcbspRxDone = 0; /* Reset for next iteration */
break;
}
}
#ifdef MCBSP_LOOP_PING_PONG
/* Change ping Pong Index */
init_count=0;
#endif
#endif /* MCBSP_EXTERNAL_CLOCK */
/* Start main loop to iterate through frames */
while(debugVar)
{
/* submit frames to the driver */
for (count = init_count; count < NUM_BUFS; count++)
{
#ifdef MCBSP_EXTERNAL_CLOCK
/* With External clock the data coming from the RX side is copied to loop back to the Tx side */
memcpy((uint8_t *)bufTx[count], (uint8_t *)bufRx[count], BUFSIZE);
#endif
#ifdef MCBSP_LOOP_PING_PONG
memset((uint8_t *)bufRxPingPong[pingPongIndex], 0, BUFSIZE);
#else
// memset((uint8_t *)bufRx[count], 0, BUFSIZE);
// /* RX frame processing */
// rxFrame[rxFrameIndex].cmd = Mcbsp_IOBuf_Cmd_READ;
// rxFrame[rxFrameIndex].addr = (void*)bufRx[count];
// rxFrame[rxFrameIndex].size = BUFSIZE;
// rxFrame[rxFrameIndex].arg = (uint32_t) hMcbspRxChan;
// rxFrame[rxFrameIndex].status = MCBSP_STATUS_COMPLETED;
// rxFrame[rxFrameIndex].misc = 1; /* reserved - used in callback to indicate asynch packet */
//
// status = mcbspSubmitChan(hMcbspRxChan, (void *)&rxFrame[rxFrameIndex]);
// if (status != MCBSP_STATUS_PENDING)
// {
// MCBSP_log ("Debug(Core %d): Error: RX buffer #%d submission FAILED\n", coreNum, count);
// retval = 1;
// }
// else
// {
//#ifdef MCBSP_APP_VERBOSE
// MCBSP_log ("Debug(Core %d): RX buffer #%d is submitted to MCBSP driver\n", coreNum, count);
//#endif
// }
// rxFrameIndex++;
// rxFrameIndex = (rxFrameIndex >= (NUM_OF_MCBSP_FRAMES)) ? 0 : rxFrameIndex;
#endif
rxSubmitCount++;
#ifdef MCBSP_LOOP_PING_PONG
/* Copy buffer from buffer to ping pong buffer*/
memcpy((uint8_t *)bufTxPingPong[pingPongIndex], (uint8_t *)bufTx[count],BUFSIZE);
#else
/* TX frame processing */
txFrame[txFrameIndex].cmd = Mcbsp_IOBuf_Cmd_WRITE;
txFrame[txFrameIndex].addr = (void*)bufTx[count];
txFrame[txFrameIndex].size = BUFSIZE;
txFrame[txFrameIndex].arg = (uint32_t)hMcbspTxChan;
txFrame[txFrameIndex].status = MCBSP_STATUS_COMPLETED;
txFrame[txFrameIndex].misc = 1; /* reserved - used in callback to indicate asynch packet */
status = mcbspSubmitChan(hMcbspTxChan, (void *)&txFrame[txFrameIndex]);
if (status != MCBSP_STATUS_PENDING)
{
MCBSP_log ("Debug(Core %d): Error: TX buffer #%d submission FAILED\n", coreNum, count);
retval = 1;
}
else
{
#ifdef MCBSP_APP_VERBOSE
MCBSP_log ("Debug(Core %d): TX buffer #%d is submitted to MCBSP driver\n", coreNum, count);
#endif
}
txFrameIndex++;
txFrameIndex = (txFrameIndex >= (NUM_OF_MCBSP_FRAMES)) ? 0 : txFrameIndex;
#endif
txSubmitCount++;
/* Wait for TX and RX processing to complete */
// while (1)
// {
// if (edmaTxDone == 1)
// {
//#ifdef MCBSP_APP_VERBOSE
// MCBSP_log ("Debug(Core %d): EDMA -> Buffer #-%d is transmitted to TX path\n", coreNum, count);
//#endif
// edmaTxDone = 0; /* Reset for next iteration */
// mcbspTxDone = 1;
// }
// if (edmaRxDone == 1)
// {
//#ifdef MCBSP_APP_VERBOSE
// MCBSP_log ("Debug(Core %d): EDMA -> Buffer #-%d is received from RX path\n", coreNum, count);
//#endif
// edmaRxDone = 0; /* Reset for next iteration */
// mcbspRxDone = 1;
// }
// if ((mcbspTxDone == 1) && (mcbspRxDone == 1))
// {
// mcbspTxDone = 0; /* Reset for next iteration */
// mcbspRxDone = 0; /* Reset for next iteration */
// break;
// }
// }
#ifdef MCBSP_LOOP_PING_PONG
/* Change ping Pong Index */
pingPongIndex=(pingPongIndex)?0:1;
/* Copy buffer from buffer to other buffer*/
memcpy((void*)bufRx[count], (uint8_t *)bufRxPingPong[pingPongIndex],BUFSIZE);
#endif
/* compare buffer contents */
// for (tempCount = 0; tempCount < BUFSIZE; tempCount++)
// {
// if (((char *)bufTx[count])[tempCount] != ((char *)bufRx[count])[tempCount])
// {
//#ifdef MCBSP_APP_VERBOSE
// MCBSP_log("Debug(Core %d): Error: TX and RX frame data DOES NOT match in Buffer #-%d\n",
// coreNum, count);
// MCBSP_log("Debug(Core %d): Error: Buffer index = %d, Tx data = %d, Rx data = %d\n", coreNum,
// tempCount, ((char *)bufTx[count])[tempCount], ((char *)bufRx[count])[tempCount]);
//#endif
// errBuffCount++;
// break;
// }
// }
if (tempCount >= BUFSIZE)
{
#ifdef MCBSP_APP_VERBOSE
MCBSP_log("Debug(Core %d): TX and RX frames data match in iteration-%d !!!\n", coreNum, count);
#endif
}
}
volatile int debug_option = 1;
while(debug_option)
{
Semaphore_pend (semTx, BIOS_WAIT_FOREVER);
// Semaphore_pend (semRx, BIOS_WAIT_FOREVER);
count = txFrameIndex;
// rxFrame[rxFrameIndex].cmd = Mcbsp_IOBuf_Cmd_READ;
// rxFrame[rxFrameIndex].addr = (void*)bufRx[count];
// rxFrame[rxFrameIndex].size = BUFSIZE;
// rxFrame[rxFrameIndex].arg = (uint32_t) hMcbspRxChan;
// rxFrame[rxFrameIndex].status = MCBSP_STATUS_COMPLETED;
// rxFrame[rxFrameIndex].misc = 1; /* reserved - used in callback to indicate asynch packet */
//
// status = mcbspSubmitChan(hMcbspRxChan, (void *)&rxFrame[rxFrameIndex]);
// rxFrameIndex++;
// rxFrameIndex = (rxFrameIndex >= (NUM_OF_MCBSP_FRAMES)) ? 0 : rxFrameIndex;
// rxSubmitCount++;
/* TX frame processing */
txFrame[txFrameIndex].cmd = Mcbsp_IOBuf_Cmd_WRITE;
txFrame[txFrameIndex].addr = (void*)bufTx[count];
txFrame[txFrameIndex].size = BUFSIZE;
txFrame[txFrameIndex].arg = (uint32_t)hMcbspTxChan;
txFrame[txFrameIndex].status = MCBSP_STATUS_COMPLETED;
txFrame[txFrameIndex].misc = 1; /* reserved - used in callback to indicate asynch packet */
status = mcbspSubmitChan(hMcbspTxChan, (void *)&txFrame[txFrameIndex]);
txFrameIndex++;
txFrameIndex = (txFrameIndex >= (NUM_OF_MCBSP_FRAMES)) ? 0 : txFrameIndex;
txSubmitCount++;
}
init_count=0;
num_iterations++;
#ifndef MCBSP_EXTERNAL_CLOCK
if(num_iterations >= NUM_OF_ITERATIONS)
break;
#endif
switch(debugCommand)
{
case DEBUG_COMMAND_RESTART_CHANNELS:
debugCommand=0;
/* Close channel and reopen */
/* Delete RX channel */
// status = mcbspDeleteChan(hMcbspRxChan);
// if (MCBSP_STATUS_COMPLETED != status)
// {
// MCBSP_log ("Debug(Core %d): Error: Delete Channel (RX) failed\n", coreNum);
// return;
// }
/* Delete TX channel*/
status = mcbspDeleteChan(hMcbspTxChan);
if (MCBSP_STATUS_COMPLETED != status)
{
MCBSP_log ("Debug(Core %d): Error: Delete Channel (TX) failed\n", coreNum);
return;
}
/* Create a RX channel for receiving */
// status = mcbspCreateChan(&hMcbspRxChan, hMcbspDev, MCBSP_MODE_INPUT, &mcbspChanparamRx, mcbspAppCallback, &rxChanMode);
// if (MCBSP_STATUS_COMPLETED != status)
// {
// MCBSP_log ("Debug(Core %d): Error: Create Channel (RX) failed\n", coreNum);
// return;
// }
/* Create a TX channel for the transmission */
status = mcbspCreateChan(&hMcbspTxChan, hMcbspDev, MCBSP_MODE_OUTPUT, &mcbspChanparamTx, mcbspAppCallback, &txChanMode);
if (MCBSP_STATUS_COMPLETED != status)
{
MCBSP_log ("Debug(Core %d): Error: Create Channel (TX) failed\n", coreNum);
return;
}
edmaTxDone = 0; /* Reset for next iteration */
edmaRxDone = 0; /* Reset for next iteration */
mcbspTxDone = 0; /* Reset for next iteration */
mcbspRxDone = 0; /* Reset for next iteration */
goto restart_mcbsp_point;
default:
debugCommand=0;
break;
}
}
if ((errBuffCount == 0 ) & (retval ==0))
{
MCBSP_log("Debug(Core %d): MCBSP Digital Loopback Application completed successfully : "\
"Num iterations %d Num buffers per iteration %d!!!\n",
coreNum, num_iterations, NUM_BUFS);
MCBSP_log("\n All tests have passed \n");
}
else
{
MCBSP_log("Debug(Core %d): MCBSP Digital Loopback application FAILED : "\
"Num iterations %d Num buffers per iteration %d Failed buffers %d!!!\n",
coreNum, num_iterations, NUM_BUFS, errBuffCount);
}
/* Delete RX channel */
status = mcbspDeleteChan(hMcbspRxChan);
if (MCBSP_STATUS_COMPLETED != status)
{
MCBSP_log ("Debug(Core %d): Error: Delete Channel (RX) failed\n", coreNum);
return;
}
/* Delete TX channel*/
status = mcbspDeleteChan(hMcbspTxChan);
if (MCBSP_STATUS_COMPLETED != status)
{
MCBSP_log ("Debug(Core %d): Error: Delete Channel (TX) failed\n", coreNum);
return;
}
return;
}
/*
* \brief Void main(Void)
*
* Main function of the sample application. This function calls the
* function to configure the mcbsp instance.
*
* \param None
*
* \return None
*/
#include "ti/sysbios/hal/Cache.h"
Void main(Void)
{
Task_Params taskParams;
EDMA3_DRV_Result edmaResult = 0;
#ifdef SIMULATOR_SUPPORT
uint8_t uchValue, uchReadValue;
#endif
_AllPscEnable();
_Board_configGpioPinMux();
/* Get the core number. */
coreNum = 1; //CSL_chipReadReg (CSL_CHIP_DNUM);
#ifdef SIMULATOR_SUPPORT
#warn MCBSP Digital Loopback example is not supported on SIMULATOR !!!
MCBSP_log ("MCBSP Digital Loopback example is not supported on SIMULATOR. Exiting!\n");
return;
#else
MCBSP_log ("Debug(Core %d): Running MCBSP Digital Loopback example on the DEVICE\n", coreNum);
#endif
/* Initialize the system only if the core was configured to do so. */
if (coreNum == CORE_SYS_INIT)
{
#if 0
MCBSP_log ("Debug(Core %d): System Initialization for MCBSP\n", coreNum);
/* Read FPGA register */
if (0 != (platform_fpgaReadConfigReg(MCBSP_FPGA_MISC_REG_OFFSET, &uchReadValue)))
{
MCBSP_log ("Debug(Core %d): FPGA McBSP_AMC_EN# register READ failed \n", coreNum);
return;
}
/* Clear field for configuration */
uchValue = (uchReadValue & (~0x3));
#ifndef PLATFORM_FPGA_MCBSP_AMC_EN
uchValue |= 0x3;
#endif
/* Drive McBSP_AMC_EN# high. Output SLCLKs, TxCLKs, RxCLKs, FSTs, FSRs as Hi-Z.
* These clocks and syncs are tri-stated and McBSP is accessed over 80-pin header */
if (0 != (platform_fpgaWriteConfigReg(MCBSP_FPGA_MISC_REG_OFFSET, (uchValue))))
{
MCBSP_log ("Debug(Core %d): FPGA McBSP_AMC_EN# register WRITE failed \n", coreNum);
return;
}
/* DEBUG: Verify if FPGA register is configured correctly */
if (0 != (platform_fpgaReadConfigReg(MCBSP_FPGA_MISC_REG_OFFSET, &uchReadValue)))
{
MCBSP_log ("Debug(Core %d): FPGA McBSP_AMC_EN# register READ failed \n", coreNum);
return;
}
if (uchValue != uchReadValue)
{
MCBSP_log ("Debug(Core %d): FPGA McBSP_AMC_EN# register setting failed \n", coreNum);
return;
}
else
{
MCBSP_log ("Debug(Core %d): FPGA McBSP_AMC_EN# register is set to %d \n", coreNum, uchValue);
}
#endif
/* MCBSP Driver Initialization: This should always be called before
* invoking the MCBSP Driver. */
mcbspInit();
/* Device Specific MCBSP Initializations */
McbspDevice_init();
/* MCBSP Driver is operational at this time. */
MCBSP_log ("Debug(Core %d): MCBSP Driver Initialization Done\n", coreNum);
/* Write to the SHARED memory location at this point in time. The other cores cannot execute
* till the MCBSP Driver is up and running. */
isMCBSPInitialized[0] = 1;
/* The MCBSP IP block has been initialized. We need to writeback the cache here because it will
* ensure that the rest of the cores which are waiting for MCBSP to be initialized would now be
* woken up. */
//CACHE_wbL1d ((void *) &isMCBSPInitialized[0], MCBSP_MAX_CACHE_ALIGN, CACHE_FENCE_WAIT);
Cache_wb ((void *) &isMCBSPInitialized[0], MCBSP_CACHE_LENGTH,0x7fff, 1);
}
else
{
/* All other cores need to wait for the MCBSP to be initialized before they proceed with the test. */
MCBSP_log ("Debug(Core %d): Waiting for MCBSP to be initialized.\n", coreNum);
/* All other cores loop around forever till the MCBSP is up and running.
* We need to invalidate the cache so that we always read this from the memory. */
while (isMCBSPInitialized[0] == 0)
//CACHE_invL1d ((void *) &isMCBSPInitialized[0], MCBSP_MAX_CACHE_ALIGN, CACHE_FENCE_WAIT);
Cache_inv ((void *) &isMCBSPInitialized[0], MCBSP_CACHE_LENGTH, 0x7fff, 1);
MCBSP_log ("Debug(Core %d): MCBSP can now be used.\n", coreNum);
}
/* Initialize EDMA3 library */
hEdma[0] = edma3init(0, &edmaResult);
if (edmaResult != EDMA3_DRV_SOK)
{
/* Report EDMA Error */
MCBSP_log("Debug(Core %d): EDMA Driver Initialization FAILED\n", coreNum);
}
else
{
MCBSP_log("Debug(Core %d): EDMA Driver Initialization Done\n", coreNum);
}
/* Create the Digital Loopback Application Task */
Task_Params_init(&taskParams);
Task_create(mcbspDigLpbkApp, &taskParams, NULL);
/* Start BIOS */
BIOS_start();
return;
}
//added {
static void _Board_configGpioPinMux(void)
{
hSysCfg->PINMUX0 = 0;
hSysCfg->PINMUX1 = 0x02020208; //DX1, FSX1, CLKX1
hSysCfg->PINMUX2 = 0x00000008;
hSysCfg->PINMUX3 = 0;
hSysCfg->PINMUX4 = 0;
hSysCfg->PINMUX5 = 0;
hSysCfg->PINMUX6 = 0;
hSysCfg->PINMUX7 = 0;
hSysCfg->PINMUX8 = 0;
hSysCfg->PINMUX9 = 0;
hSysCfg->PINMUX10 = 0;
hSysCfg->PINMUX11 = 0;
hSysCfg->PINMUX12 = 0;
hSysCfg->PINMUX13 = 0;
hSysCfg->PINMUX14 = 0;
hSysCfg->PINMUX15 = 0;
hSysCfg->PINMUX16 = 0;
hSysCfg->PINMUX17 = 0;
hSysCfg->PINMUX18 = 0;
hSysCfg->PINMUX19 = 0;
}
void _Board_moduleClockEnable(uint32_t module)
{
/* Set NEXT state to ENABLE */
CSL_PSC_setModuleNextState(module, PSC_MODSTATE_ENABLE);
if(module >= PSC0_MAX_LPSC_MODULE)
{
/* Set GO bit to initiate state transition */
CSL_PSC_startStateTransition2(0);
/* Wait for power state transition to finish */
while (!CSL_PSC_isStateTransitionDone2(0));
}
else
{
/* Set GO bit initiate state transition */
CSL_PSC_startStateTransition(0);
/* Wait for power state transition to finish */
while (!CSL_PSC_isStateTransitionDone(0));
}
/* Wait for state transition */
while (CSL_PSC_getModuleState(module) != PSC_MODSTATE_ENABLE);
}
void _AllPscEnable(void)
{
/* Enable clock for the modules under PSC0 */
_Board_moduleClockEnable(CSL_PSC_CC);
_Board_moduleClockEnable(CSL_PSC_TC0);
_Board_moduleClockEnable(CSL_PSC_TC1);
_Board_moduleClockEnable(CSL_PSC_EMIFA);
_Board_moduleClockEnable(CSL_PSC_SPI0);
_Board_moduleClockEnable(CSL_PSC_MMCSD0);
#ifndef _TMS320C6X
_Board_moduleClockEnable(CSL_PSC_AINTC);
#endif
_Board_moduleClockEnable(CSL_PSC_UART0);
_Board_moduleClockEnable(CSL_PSC_SCR0_SS);
_Board_moduleClockEnable(CSL_PSC_SCR1_SS);
_Board_moduleClockEnable(CSL_PSC_SCR2_SS);
/* Enable clock for the modules under PSC1 */
_Board_moduleClockEnable(CSL_PSC_EDMA_CC1);
_Board_moduleClockEnable(CSL_PSC_USB20);
_Board_moduleClockEnable(CSL_PSC_USB11);
_Board_moduleClockEnable(CSL_PSC_GPIO);
_Board_moduleClockEnable(CSL_PSC_UHPI);
_Board_moduleClockEnable(CSL_PSC_EMAC);
_Board_moduleClockEnable(CSL_PSC_MCASP0);
_Board_moduleClockEnable(CSL_PSC_VPIF);
_Board_moduleClockEnable(CSL_PSC_SPI1);
_Board_moduleClockEnable(CSL_PSC_I2C1);
_Board_moduleClockEnable(CSL_PSC_UART1);
_Board_moduleClockEnable(CSL_PSC_UART2);
_Board_moduleClockEnable(CSL_PSC_MCBSP0);
_Board_moduleClockEnable(CSL_PSC_MCBSP1);
_Board_moduleClockEnable(CSL_PSC_LCDC);
_Board_moduleClockEnable(CSL_PSC_EPWM);
_Board_moduleClockEnable(CSL_PSC_MMCSD1);
_Board_moduleClockEnable(CSL_PSC_UPP);
_Board_moduleClockEnable(CSL_PSC_ECAP);
_Board_moduleClockEnable(CSL_PSC_EDMA_TC2);
}
//added }
/* ========================================================================== */
/* END OF FILE */
/* ========================================================================== */
Registers:
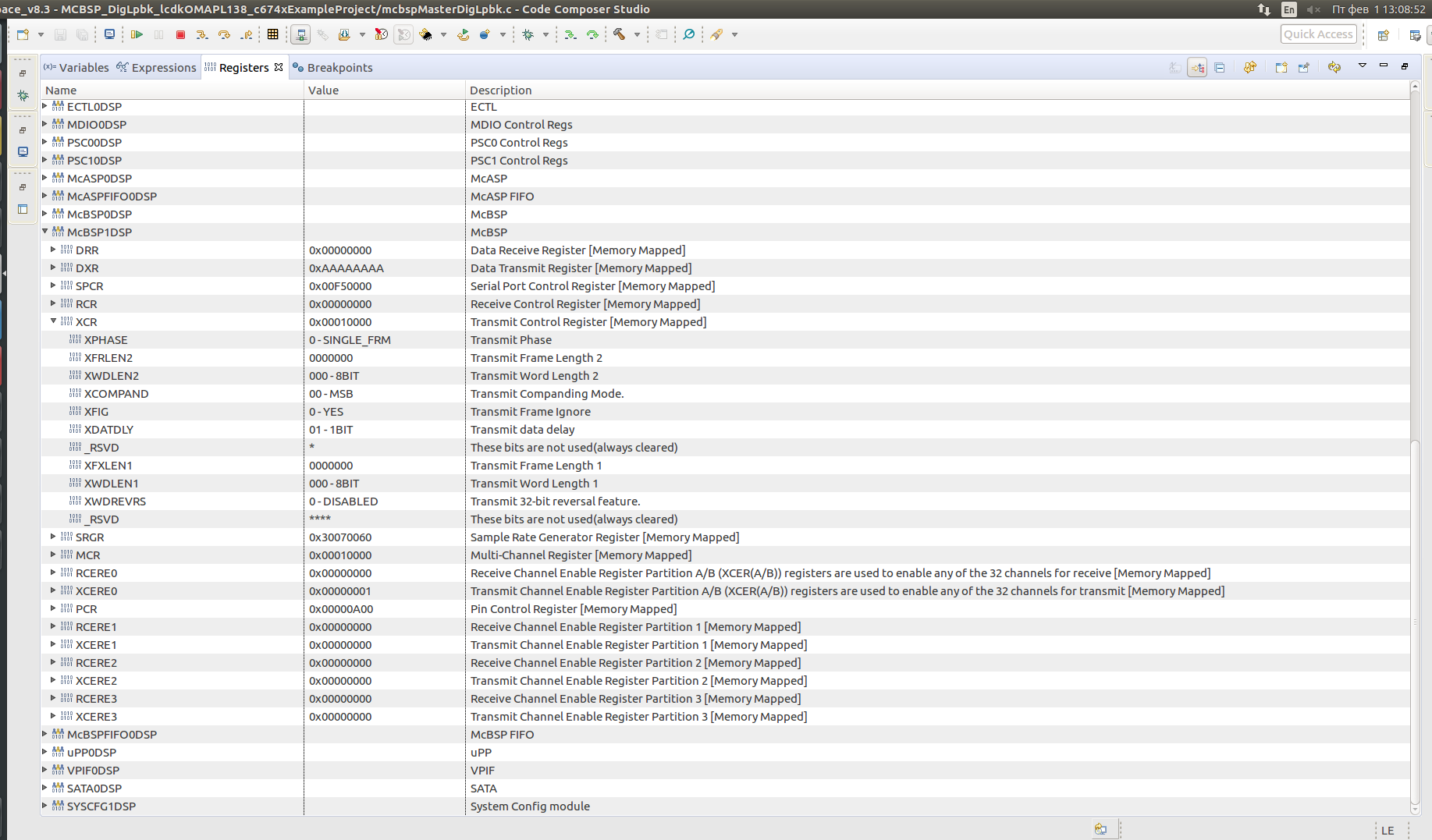
registers dump:
McBSP1DSP_DRR 00000000 McBSP1DSP_DXR AAAAAAAA McBSP1DSP_SPCR 00F50000 McBSP1DSP_RCR 00000000 McBSP1DSP_XCR 00010000 McBSP1DSP_SRGR 30070060 McBSP1DSP_MCR 00010000 McBSP1DSP_RCERE0 00000000 McBSP1DSP_XCERE0 00000001 McBSP1DSP_PCR 00000A00 McBSP1DSP_RCERE1 00000000 McBSP1DSP_XCERE1 00000000 McBSP1DSP_RCERE2 00000000 McBSP1DSP_XCERE2 00000000 McBSP1DSP_RCERE3 00000000 McBSP1DSP_XCERE3 00000000 00000000 00000000 00000000 00000000 00000000 00000000 44120905 00000090 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 AAAAAAAA 00F50000 00000000 00010000 30070060 00010000 00000000 00000001 00000A00 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 44120905 00000090 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 AAAAAAAA 00F50000 00000000 00010000 30070060 00010000 00000000 00000001 00000A00 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 44120905 00000090 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 AAAAAAAA 00F50000 00000000 00010000 30070060 00010000 00000000 00000001 00000A00 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 44120905 00000090 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 AAAAAAAA 00F50000 00000000 00010000 30070060 00010000 00000000 00000001 00000A00 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 44120905 00000090 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 AAAAAAAA 00F50000 00000000 00010000 30070060 00010000 00000000 00000001 00000A00 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 44120905 00000090 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 AAAAAAAA 00F50000 00000000 00010000 30070060 00010000 00000000 00000001 00000A00 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 44120905 00000090 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 AAAAAAAA 00F50000 00000000 00010000 30070060 00010000 00000000 00000001 00000A00 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 44120905 00000090 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 McBSPFIFO0DSP_REVID 44311100 00000000 00000000 00000000 McBSPFIFO0DSP_WFIFOCTL 00010101
Thanks for any help!
Petr