Other Parts Discussed in Thread: TINA-TI
Tool/software: TINA-TI or Spice Models
Hi,
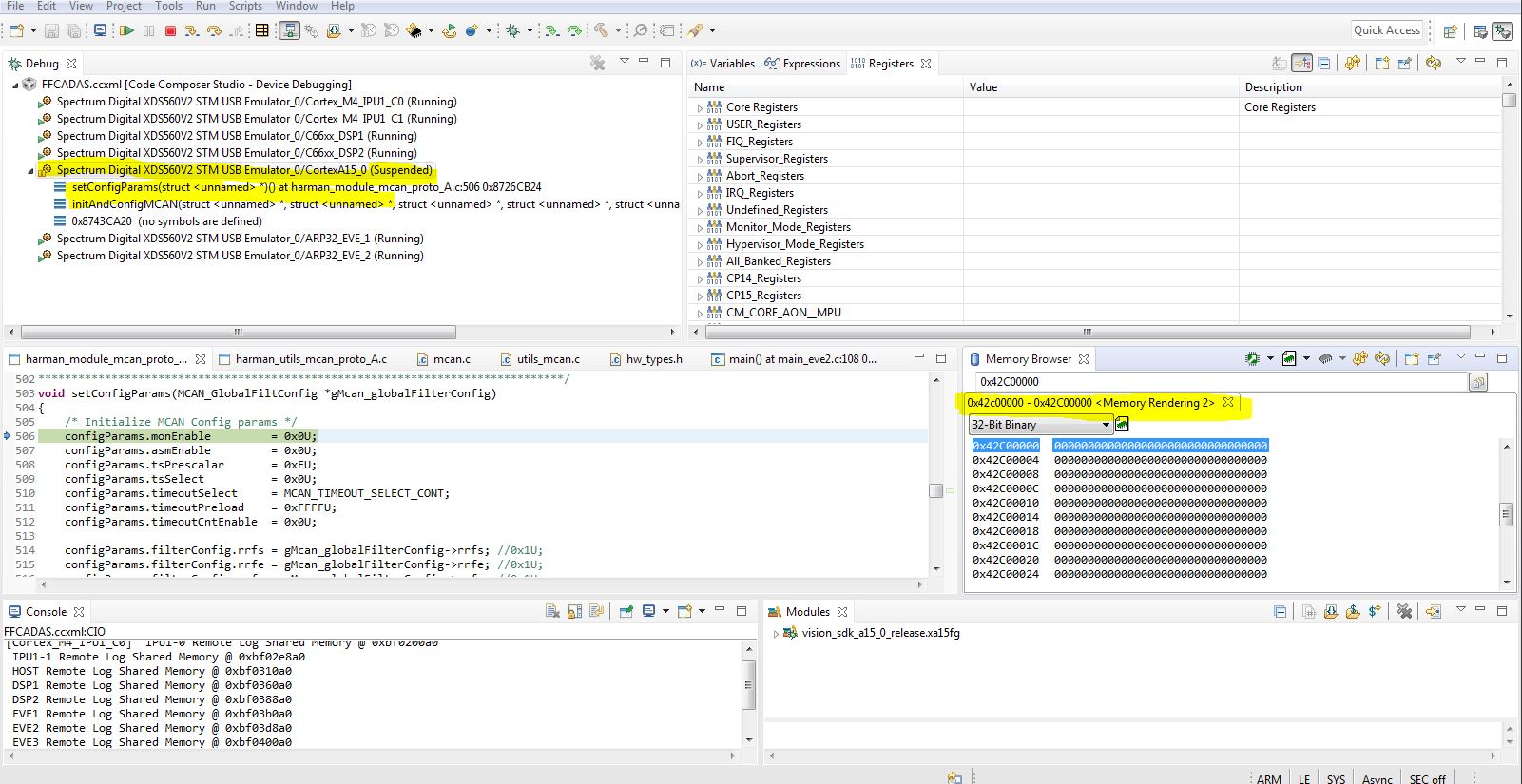
I am using VSDK3.3 we have moved MCAN on A15 which was previously running on in ipu_0 core.
We have observed that whenever our mcan driver tries to call mcan api's provided by mcan module by ti, we are getting below exception

.Regards,
Bikash