


Other Parts Discussed in Thread: DRV8313
Versions of installed software on my PC:
CCS: 8.3.0.00009
TwinCAT: 3.1.4022
Microsoft Visual Studio: 2013 4.7.03056
and versions of other CCS components:

Hardware that I am using:
Motor: Anaheim Automation BLY171D-24V-4000
Encoder: ROC 413 2048 (3,6 - 14V) Heidenhein
Board: TI IDK AM437x rev 1.4A
Hello,
I have a problem with motor control through EtherCat(TwinCat) in example project cia402. I downloaded SSC from Beckhoff and patched it with Option#1 so i can use it with cia402 example. I moved "ESI" files into Twincat folders.
Then I was following instructions described in this PDF http://www.ti.com/lit/ug/tidu800b/tidu800b.pdf. As I do not have encoder ROQ 437 Heidenhein I used encoder ROC 413 Heidenhein. I recalculated "Scaling Factor Numerator" and "Output Scaling Factor (Velocity)", becouse mine Encoder has Encoder resolution of 13. With that I changed Code in CCS :
#define TWINCAT_SINGLE_TURN_RES pow(2, [20 I changed this to 13 as described in the PDF])
#define TWINCAT_VELOCITY_RES pow(2, [20 I changed this to 13 as described in the PDF])
If i am lucky that TwinCat does not show error messages like (17245 (0x435d)- which I do not understand really)
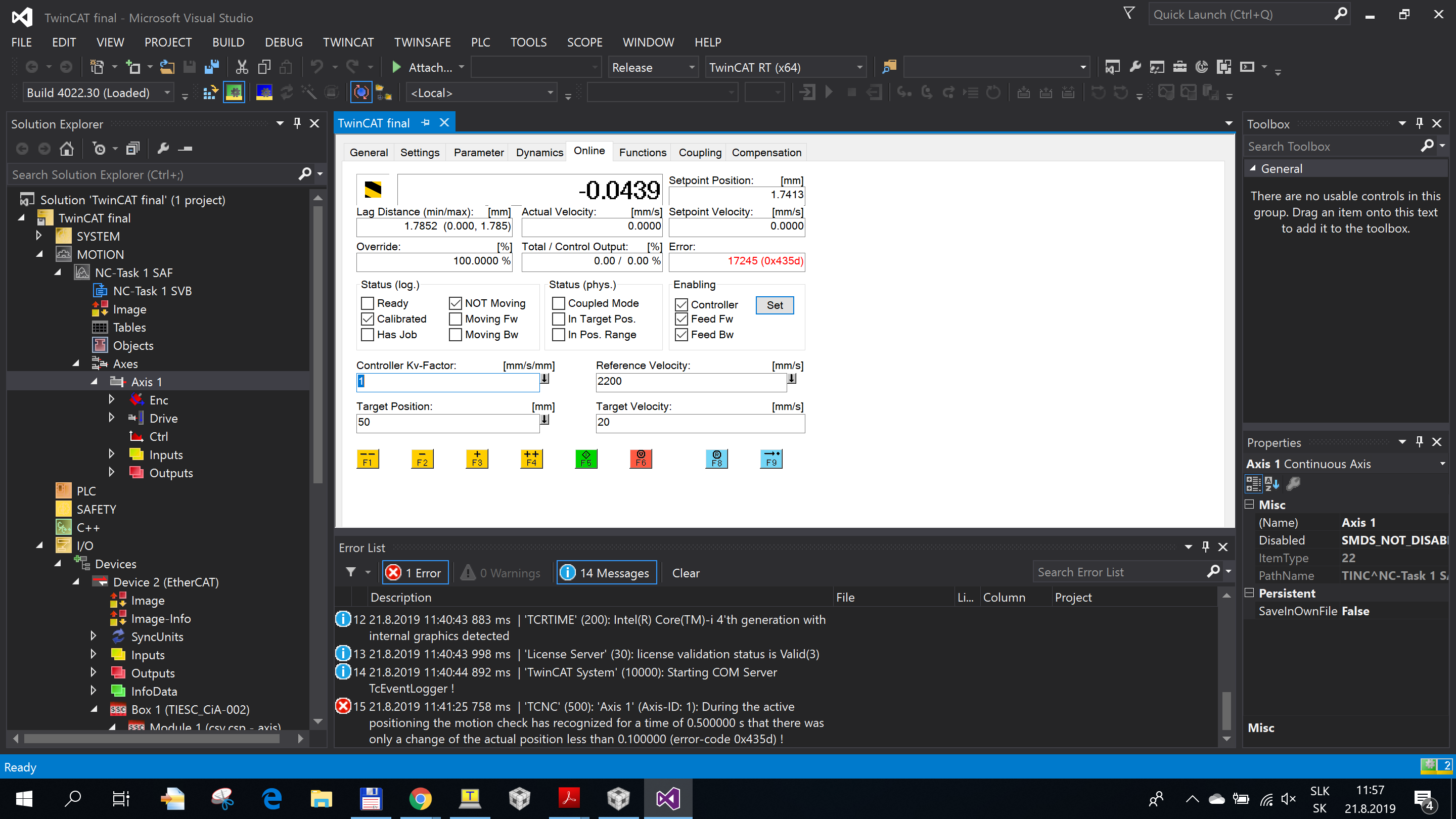
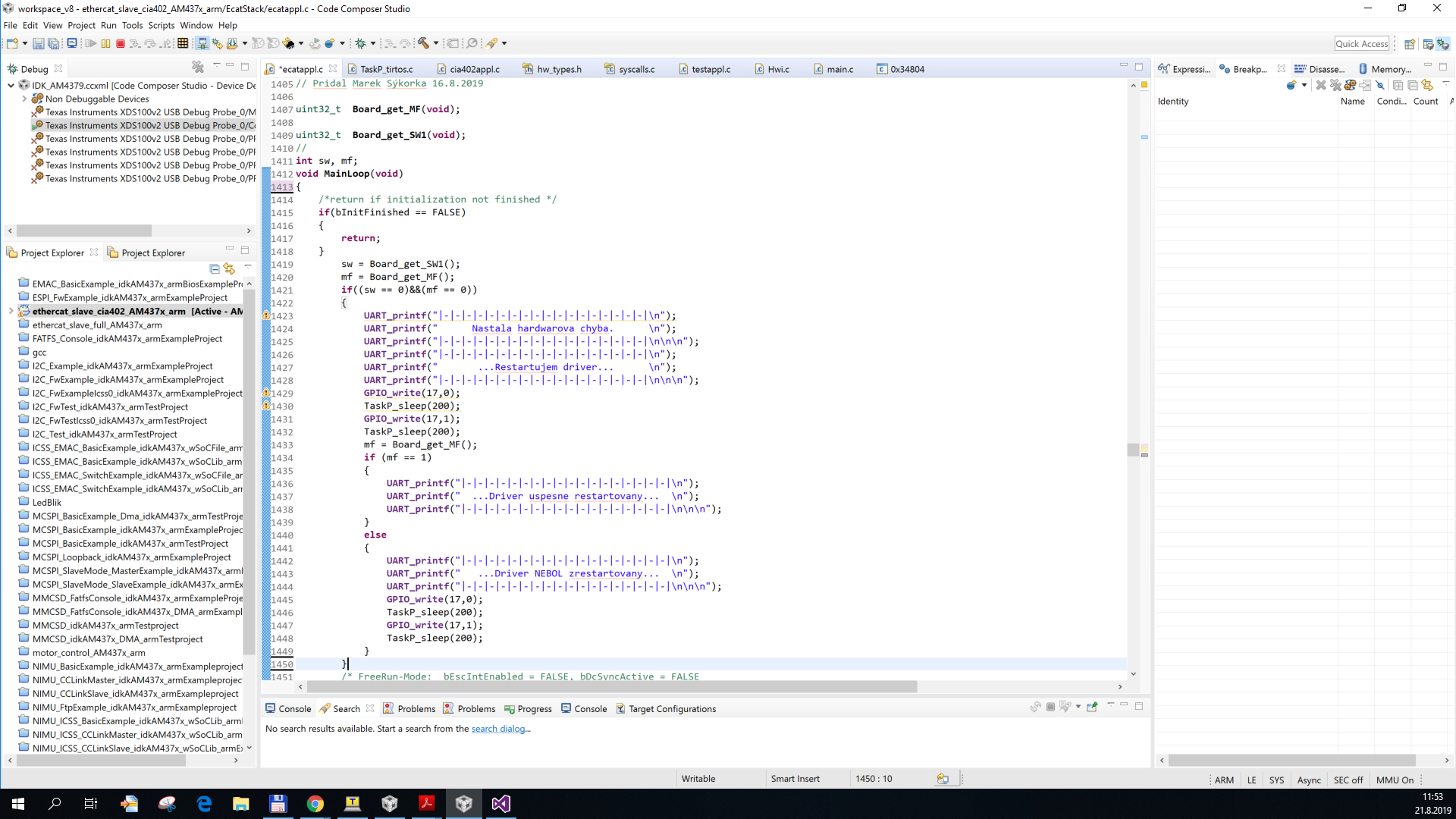
and I can press F5(motor start), but after pressing it (when Controller, Feed FW, Feed BW Override 100 and Target Position as well as speed is set) nothing happens motor does not turn. Motor does some funny noises but its very rare its normally quiet. When I press motor stop it slightly moves to one side really fast(some 1° - 5°) its choppy motion. In the most cases the hardware motor fault of the board turns on after DRV8313 notices something wrong. Thats the only place where we modified the main CCS code, we are reading if the motor fault had happend and if the User Switch is pressed and then we send impulse to reset DRV8313 so we do not need to restart the whole program while testing. We did not find any reseting of this motor fault in the program so we created ours.
I was thinking that maybe the endat connection with encoder was to blame becouse the TwinCat enviroment does not show current position when we move with the axis by hand, but then I figured out that if the connection was wrong the cia402 application or motor contorol application would not run and error message would have appear that endat is not connected.
So we think that our PC is not corectly connected to the board through TwinCat or the settings and parameters are set wrong in the TwinCat enviroment.
We do not really understand why the real position does not show in TwinCat when program is running.
So final most important question is: Why is not the motor turning? When we went by the "book". PDF/website
Thank you in advance.
Marek S.
(Marek in English can be Marco, Mark.)
I am really sorry if my english is terrible or it does not make sense. I am midlle school student working in "unnamed" company. I am working like summer job, brigade, And my job was to find out the most i could about the board and the proccesor becouse this company wants to make change from single core processors in their devices to multicore processors. So the employees do not now either, its new for them too.










