Part Number: AM3358
Hi. TI.
I would like to add a DCAN device to the EVMSK device.
So I did the following:
The software versions I currently use are:
ti-processor-sdk-linux-am335x-evm-06.01.00.08
========================================================================
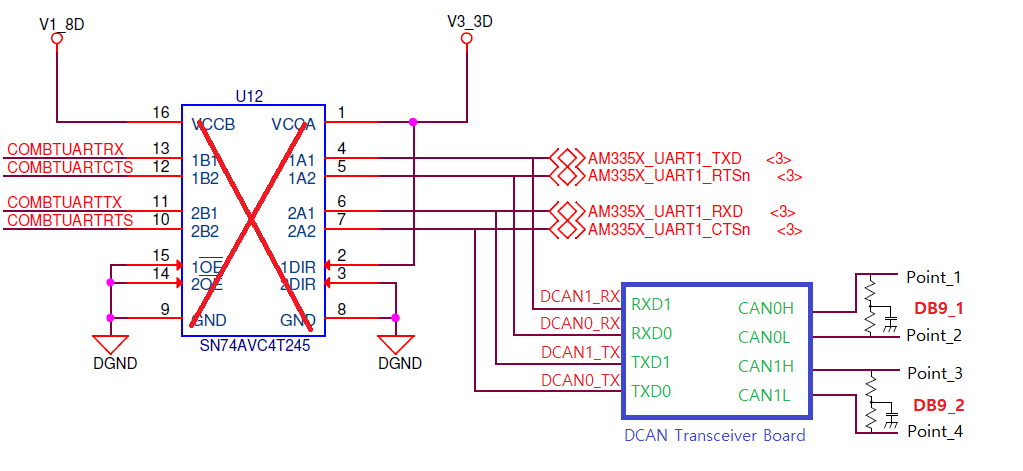
1. Connect CAN Transceiver to EVMSK.
AM335x Starter Kit (SK) Refer to the Schematic.pdf document and connect two CAN Transceivers to the following circuit.

2. Device tree modification.
/ti-processor-sdk-linux-am335x-evm-06.01.00.08/board-support/linux-4.19.59+gitAUTOINC+5f8c1c6121-g5f8c1c6121/arch/arm/boot/dts/am335x-evmsk.dts
&am33xx_pinmux {
dcan0_pins_default: dcan0_pins_default {
pinctrl-single,pins = <
AM33XX_IOPAD(0x978, PIN_INPUT | MUX_MODE0) /* uart1_ctsn.d_can0_tx */
AM33XX_IOPAD(0x97C, PIN_OUTPUT_PULLDOWN | MUX_MODE0) /* uart1_rtsn.d_can0_rx */
>;
};
dcan1_pins_default: dcan1_pins_default {
pinctrl-single,pins = <
AM33XX_IOPAD(0x984, PIN_OUTPUT_PULLDOWN | MUX_MODE0) /* uart1_tx.d_can1_rx */
AM33XX_IOPAD(0x980, PIN_INPUT_PULLUP | MUX_MODE0) /* uart1_rx.d_can1_tx*/
>;
};
}
…
&dcan0 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&dcan0_pins_default>;
};
&dcan1 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&dcan1_pins_default>;
};
3. Build and SD Card Flash
========================================================================
I have a question.
Q1. Did I write the dts file correctly?
Q2. Is there anything else I need to do to activate CAN?
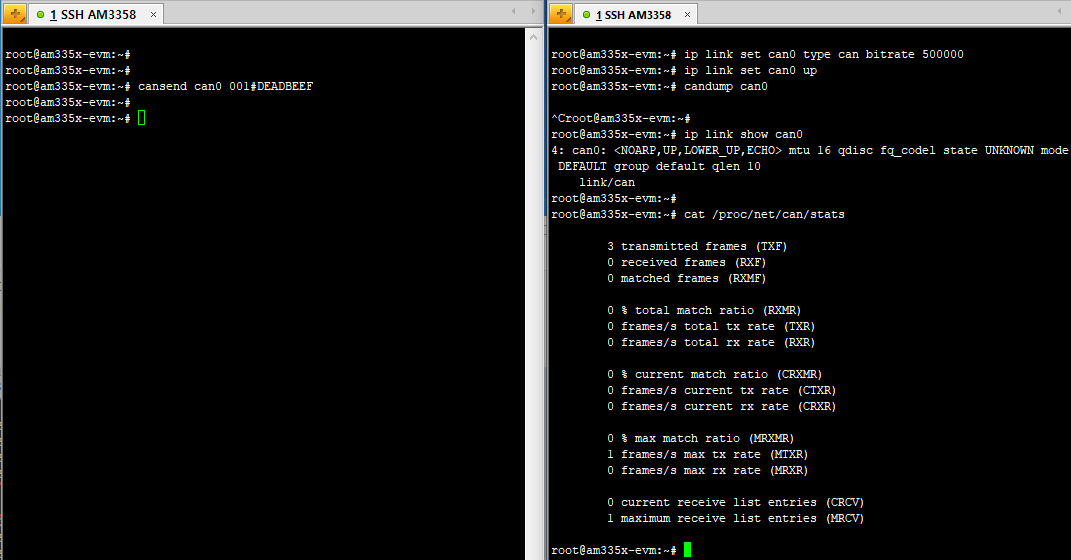
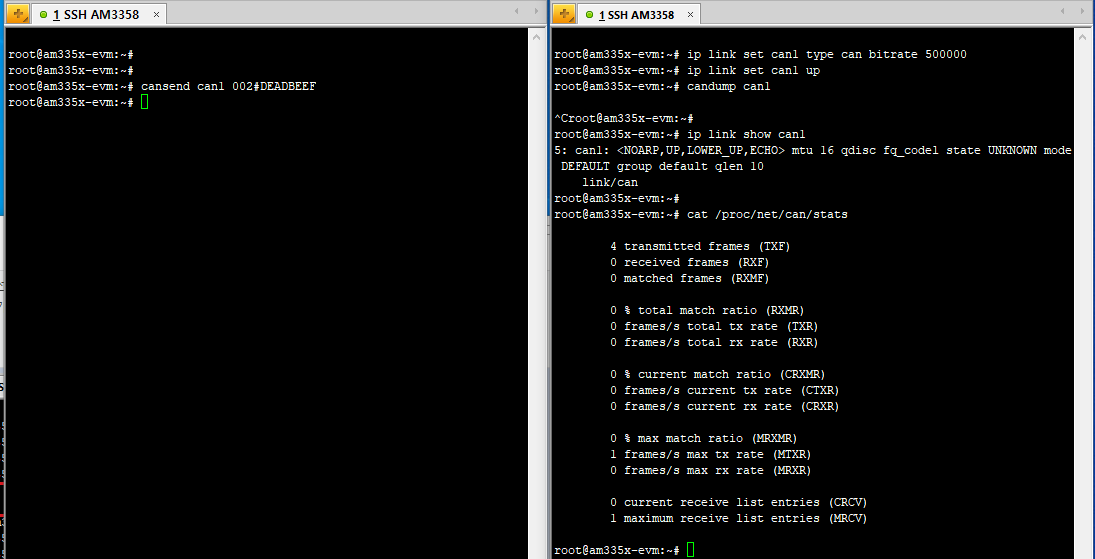
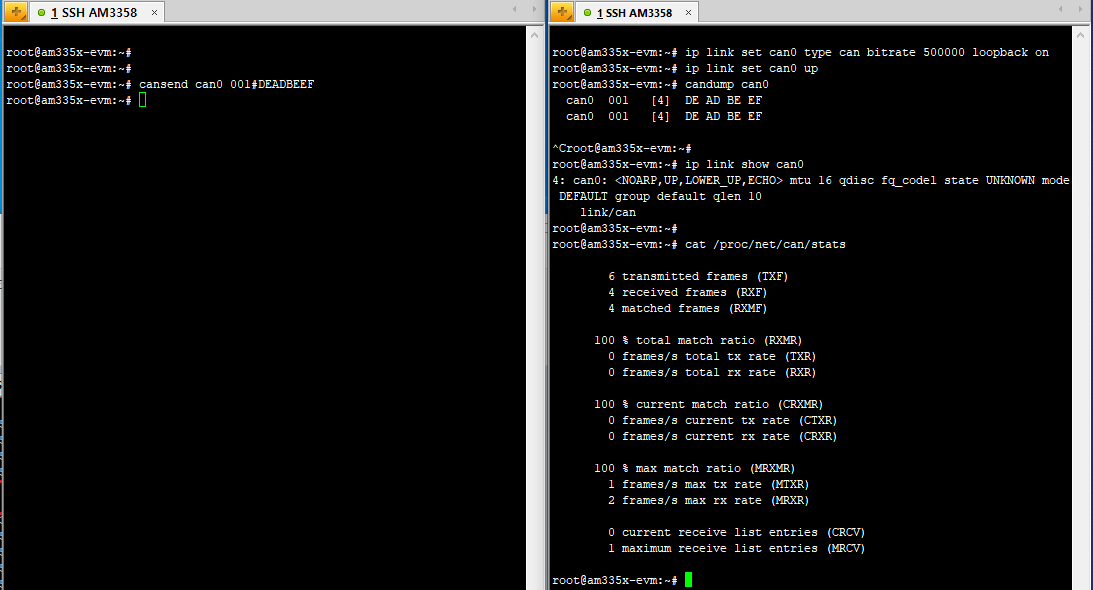
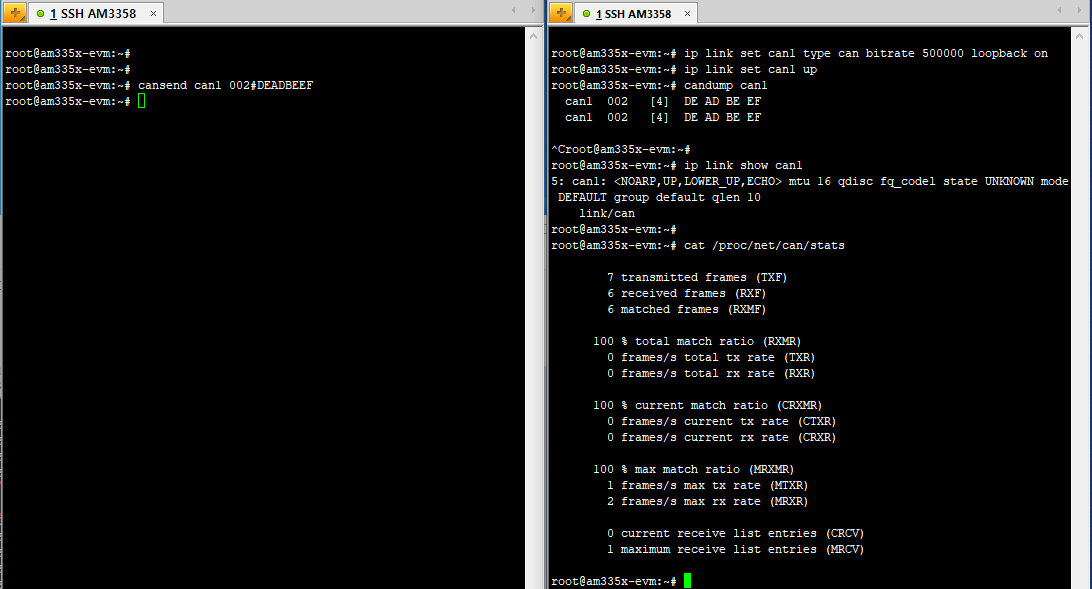
Q3. How to check if CAN is enabled?
What devices appear in /dev/ ?
Thank you in advance.
Regards,
Simon