Hi,
I need uart5 to receive gps signal.
So I added utils_uart_0.c, when I run System_uartInit () the system hangs.
How can I solve it??
SDK : PROCESSOR_SDK_VISION_03_04_00_00
Board : Custom Board
The System_uart0Init() code below
Void System_uart0Init(void)
{
Uart_ChanParams chanParams;
Error_Block eb;
GIO_Params ioParams;
static char uartName[16]; /* device name MUST be global or static variable */
static DEV_Struct uartDevObj;
static GIO_Struct uartTxObj;
static GIO_Struct uartRxObj;
static SyncSem_Struct uartTxSyncSemObj;
static SyncSem_Struct uartRxSyncSemObj;
static Semaphore_Struct uartTxSemObj;
static Semaphore_Struct uartRxSemObj;
static IOM_Packet uartTxIomObj[UART_ASYNC_IOM_PACKET_MAX];
static IOM_Packet uartRxIomObj[UART_ASYNC_IOM_PACKET_MAX];
DEV_Params devParams;
Uart_Params uartParams;
SyncSem_Params syncSemParams;
Semaphore_Params semParams;
Int32 devId;
Error_init(&eb);
/*
* Initialize channel attributes.
*/
GIO_Params_init(&ioParams);
//Jay do not do it again, cause System_uartInit had already do Uart_init
//Uart_init();
if(Bsp_platformIsTda2xxFamilyBuild())
{
//Harware HD-AVM-0302 for GPS
strcpy(uartName, "/uart4");
devId = 4;
/* Set the pin Mux */
//Bsp_boardSetPinMux(BSP_DRV_ID_UART, BSP_DEVICE_UART_INST_ID_4, BSP_BOARD_MODE_DEFAULT);
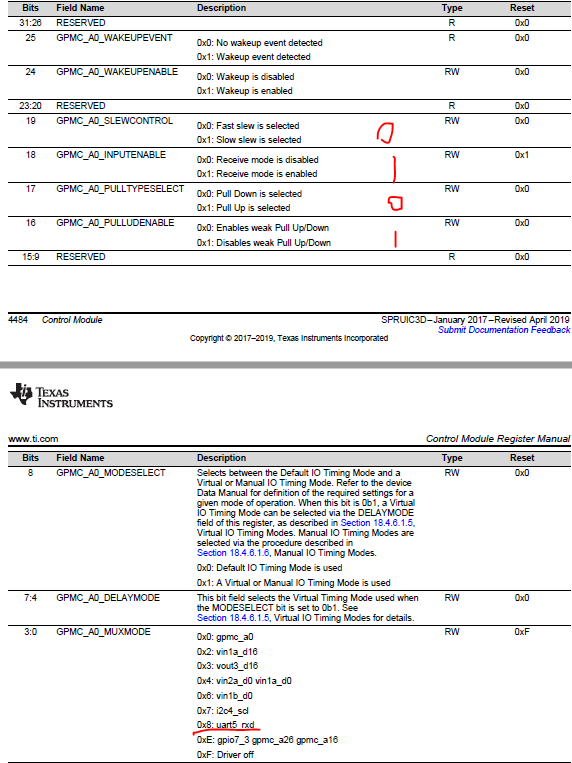
HW_WR_REG32(0x4A003440,0x00050008);// uart5_rxd Pinmux
HW_WR_REG32(0x4A003444,0x00010008);// uart5_txd Pinmux
}
else if(Bsp_platformIsTda3xxFamilyBuild())
{
#if 0 //adas_0101
//'
strcpy(uartName, "/uart0"); //0x00050000 uart1
devId = 0; //0x00050000 uart1
HW_WR_REG32(0x4A0035BC,0x00050000);//0x00050000 uart1_rxd
HW_WR_REG32(0x4A0035C0,0x00010000);//0x00010000 uart1_txd
#endif
#if 1
//Harware BSD-0101 for GPS
/* Set the pin Mux */
strcpy(uartName, "/uart1"); // uart2
devId = 1; // uart2
HW_WR_REG32(0x4A003450,0x00050002);//0x00050000 Pinmux uart2_rxd
#endif
}
else
{
Vps_printf("NOT TDA2XX AND TDA3XX!! PLEASE CHECK YOUR HARDWARE!!\n");
}
Vps_printf("######Jay uart devId = %d###########\n",devId);
uartParams = Uart_PARAMS;
uartParams.opMode = UART_OPMODE_INTERRUPT;
uartParams.hwiNumber = 8u;
uartParams.rxThreshold = UART_RXTRIGLVL_8;
uartParams.txThreshold = UART_TXTRIGLVL_56;
uartParams.baudRate = UART_BAUDRATE_9_6K; //radar 230400U UART_BAUDRATE_9_6K
uartParams.prcmDevId = 0;
/* INVARIANT_CONDITION.UNREACH
* MISRAC_2004_Rule_13.7
* MISRAC_WAIVER:
* Code is currently unreachable.
* This is kept to ensure future updates to modes.
*/
if(uartParams.opMode == UART_OPMODE_POLLED)
{
Vps_printf(" SYSTEM: UART: POLLED Mode is Selected \n");
}
else if(uartParams.opMode == UART_OPMODE_INTERRUPT)
{
Vps_printf(" SYSTEM: UART: INTERRUPT Mode is Selected \n");
}
else
{
/* MISRA WARNING */
}
uartParams.enableCache = (Bool)FALSE;
/* initialise the edma library and get the EDMA handle */
chanParams.hEdma = NULL;
/* If cross bar events are being used then make isCrossBarIntEn = TRUE and
* choose appropriate interrupt number to be mapped (assign it to
* intNumToBeMapped)
*/
chanParams.crossBarEvtParam.isCrossBarIntEn = (Bool)FALSE;
chanParams.crossBarEvtParam.intNumToBeMapped = 0xFFU;
#if 0 //Not sure whether to do it
//Add by TIM for HD_AVM_0302 //IRQ 59、OK
if(Bsp_platformIsTda2xxFamilyBuild())
{
UInt32 cookie = 0;
uartParams.prcmDevId = 4;//Uart5
uartParams.hwiNumber = CSL_XBAR_INST_IPU1_IRQ_59;
/* Configure the crossbar */
BspOsal_irqXbarConnectIrq((UInt32) CSL_XBAR_INST_IPU1_IRQ_59, (UInt32)CSL_XBAR_UART5_IRQ);
/* Configure the Interrupt */
cookie = BspOsal_disableInterrupt();
Hwi_enableInterrupt(CSL_XBAR_INST_IPU1_IRQ_59);
/* Restore interrupts */
BspOsal_restoreInterrupt(cookie);
}
#endif
ioParams.chanParams = (Ptr)&chanParams;
#if 1
DEV_Params_init(&devParams);
devParams.deviceParams = &uartParams;
devParams.initFxn = NULL;
devParams.devid = devId;
/* MISRA.CAST.CONST
* MISRAC_2004 Rule_11.5
* MISRAC_WAIVER:
* External package errors like bios which are not
* part of VSDK package can't be fixed
*/
DEV_construct(&uartDevObj, uartName, (Ptr)&Uart_IOMFXNS, &devParams, &eb);
#if 1
SyncSem_Params_init(&syncSemParams);
Semaphore_Params_init(&semParams);
semParams.mode = Semaphore_Mode_BINARY;
Semaphore_construct(&uartTxSemObj, 0, &semParams);
syncSemParams.sem = Semaphore_handle(&uartTxSemObj);
SyncSem_construct(&uartTxSyncSemObj, &syncSemParams, &eb);
ioParams.sync =
SyncSem_Handle_upCast(
SyncSem_handle(
&uartTxSyncSemObj
)
)
;
if(ioParams.numPackets > UART_ASYNC_IOM_PACKET_MAX)
{
UTILS_assert(ioParams.numPackets <= UART_ASYNC_IOM_PACKET_MAX);
}
memset(&uartTxIomObj[0], 0, ioParams.numPackets * sizeof (IOM_Packet));
ioParams.packets = &uartTxIomObj[0];
#endif
/* create the required channels(TX/RX) for the UART demo */
GIO_construct(&uartTxObj, uartName, (UInt32)GIO_OUTPUT, &ioParams, &eb);
#if 1
SyncSem_Params_init(&syncSemParams);
Semaphore_Params_init(&semParams);
semParams.mode = Semaphore_Mode_BINARY;
Semaphore_construct(&uartRxSemObj, 0, &semParams);
syncSemParams.sem = Semaphore_handle(&uartRxSemObj);
SyncSem_construct(&uartRxSyncSemObj, &syncSemParams, &eb);
ioParams.sync =
SyncSem_Handle_upCast(
SyncSem_handle(
&uartRxSyncSemObj
)
)
;
memset(&uartRxIomObj[0], 0, ioParams.numPackets * sizeof (IOM_Packet));
ioParams.packets = &uartRxIomObj[0];
#endif
GIO_construct(&uartRxObj, uartName, (UInt32)GIO_INPUT, &ioParams, &eb);
uart0TxHandle = GIO_handle(&uartTxObj);
uart0RxHandle = GIO_handle(&uartRxObj);
#endif
/* INVARIANT_CONDITION.UNREACH
* MISRAC_2004_Rule_13.7
* MISRAC_WAIVER:
* Code is currently unreachable.
* This is kept to ensure future updates by the called function.
*/
if ((NULL == uart0RxHandle) || (NULL == uart0TxHandle))
{
Vps_printf(" SYSTEM: UART: ERROR: GIO_create(%s) Failed !!!\n", uartName);
}
else
{
Init0Done = (Bool)TRUE;
}
}