


Hello everyone,
I have established SPI communication using the pins of SPI NOR flash, as I explained in this post: https://e2e.ti.com/support/processors/f/791/p/902619/3342190#3342190.
I attempted to upgrade the communication, so that it uses DMA. Therefore, I have noticed that all of the functions of SPI driver have a corresponding calls to functions in case DMA is enabled. I have found the definitions of SPI configuration and transfer using DMA in the C:\ti\pdk_c665x_2_0_15\packages\ti\drv\spi\soc\dma\v0 directory inside the file SPI_dma.c, and also used main_mcspi_test.c, found in C:\ti\pdk_c665x_2_0_15\packages\ti\drv\spi\test\src as reference. Additionally I have imported several files from C:\ti\edma3_lld_2_12_05_30E\packages\ti\sdo\edma3\drv\sample and C:\ti\edma3_lld_2_12_05_30E\packages\ti\sdo\edma3\rm\sample, as they contained several function definitions needed for the building of code. Finally, I was able to build the code without the error, but when I try executing it, the EDMA Iinitialization returns PASS, but the transfer is failed due to TIMEOUT error. While debugging, I noticed that functions for dma interrupts are not being called at all, therefore I thought that maybe I have a mistake in SPI configuration.
Am I initializing SPI and DMA correctly?
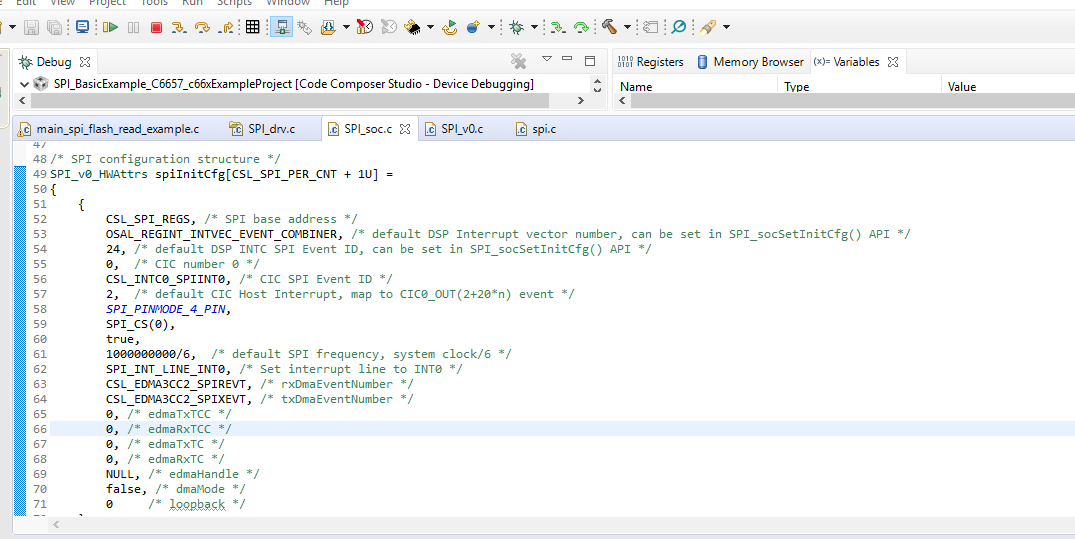
Parameters of SPI configuration structure:
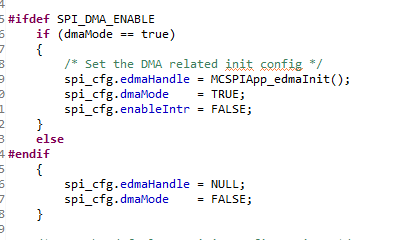
Here is what I change from the parameters of SPI configuration structure:
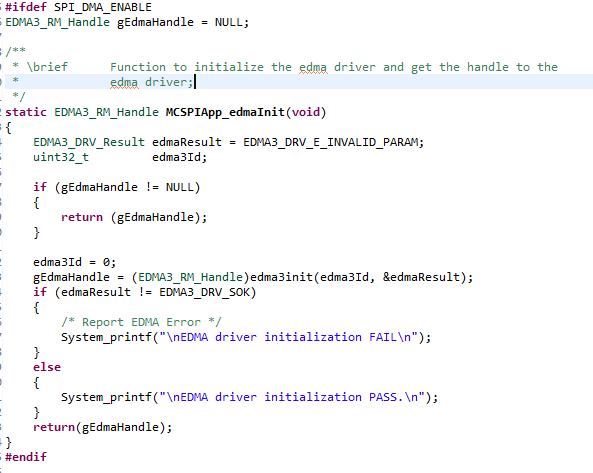
And here is the function for EDMA init:
Here are all of the files imported in the project:

I will appreciate any help or comment. If needed, I can attach any of the files that I use.
Here is the main file:
/**
* \file main_spi_flash_read_example.c
*
* \brief Example application main file. This application will read
* the data from flash through spi interface.
*
*/
#ifndef BARE_METAL
/* XDCtools Header files */
#include <xdc/std.h>
#include <xdc/cfg/global.h>
#include <xdc/runtime/System.h>
#include <stdio.h>
#include <xdc/runtime/Error.h>
/* BIOS Header files */
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Task.h>
#endif
/* SPI Header files */
#include <ti/drv/spi/SPI.h>
#if defined(SOC_K2H) || defined(SOC_K2K) || defined(SOC_K2E) || defined(SOC_K2L) || defined(SOC_K2G) || defined(SOC_C6678) || defined(SOC_C6657) || defined(SOC_OMAPL137) || defined(SOC_OMAPL138)
#include <ti/drv/spi/src/v0/SPI_v0.h>
#endif
#include <ti/drv/spi/soc/SPI_soc.h>
#include <ti/drv/spi/test/src/SPI_log.h>
#include <ti/drv/spi/test/src/SPI_test.h>
/* GPIO Header files */
#include <ti/drv/gpio/GPIO.h>
#include <ti/drv/gpio/soc/GPIO_v1.h>
/* Board Header files */
#include <ti/board/board.h>
#include <ti/board/src/flash/include/board_flash.h>
#ifdef SPI_DMA_ENABLE
#include <ti/osal/CacheP.h>
/* EDMA3 Header files */
#include <ti/sdo/edma3/drv/edma3_drv.h>
#include <ti/sdo/edma3/rm/edma3_rm.h>
#include <ti/sdo/edma3/rm/sample/bios6_edma3_rm_sample.h>
#endif
/**********************************************************************
************************** Macros ************************************
**********************************************************************/
/**********************************************************************
************************** Internal functions ************************
**********************************************************************/
/**********************************************************************
************************** Global Variables **************************
**********************************************************************/
#ifdef SPI_DMA_ENABLE
static EDMA3_RM_Handle MCSPIApp_edmaInit(void);
#endif
//Char myTaskStack[1024];
//Task_Struct myTaskStruct;
bool loop = true;
bool dmaMode = true; // PROMIJENITI U SLUCAJU NE KORISCENJA DMA
//SPI_Handle spiHandle;
//SPI_Params spiParams;
//SPI_Transaction spiTransaction;
/*
* ======== Board_initSPI ========
*/
void Board_initSPI(void)
{
Board_initCfg boardCfg;
SPI_v0_HWAttrs spi_cfg;
Board_SoCInfo socInfo;
bool boardStatus;
/* Get the default SPI init configurations */
SPI_socGetInitCfg(0, &spi_cfg);
/* Update the SPI functional clock based on CPU clock*/
Board_getSoCInfo(&socInfo);
if(socInfo.sysClock != BOARD_SYS_CLK_DEFAULT)
{
spi_cfg.inputClkFreq = socInfo.sysClock/SPI_MODULE_CLOCK_DIVIDER;
}
#ifdef SPI_DMA_ENABLE
if (dmaMode == true)
{
/* Set the DMA related init config */
spi_cfg.edmaHandle = MCSPIApp_edmaInit();
spi_cfg.dmaMode = TRUE;
spi_cfg.enableIntr = FALSE;
}
else
#endif
{
spi_cfg.edmaHandle = NULL;
spi_cfg.dmaMode = FALSE;
}
/* Set the default SPI init configurations */
SPI_socSetInitCfg(0, &spi_cfg);
boardCfg = BOARD_INIT_PINMUX_CONFIG |
BOARD_INIT_MODULE_CLOCK |
BOARD_INIT_UART_STDIO;
boardStatus = Board_init(boardCfg);
if (boardStatus != BOARD_SOK)
{
printf("\nBoard not OK!\n");
}
else{
printf("\nBoard OK!\n");
}
}
/*
* ======== test function ========
*/
#ifdef BARE_METAL
void main()
#else
void spi_test(UArg arg0, UArg arg1)
#endif
{
SPI_Handle spiHandle;
SPI_Params spiParams;
SPI_Transaction spiTransaction1;
uint32_t xferEnable;
uint32_t terminateXfer = 0;
SPI_v0_HWAttrs const *hwAttrs = NULL;
SPI_v0_Object *object = NULL;
bool retVal;
#ifdef BARE_METAL
/* Call board init functions */
Board_initSPI();
#endif
SPI_init();
SPI_Params_init(&spiParams);
spiParams.frameFormat = SPI_POL1_PHA1;// for DAC
//spiParams.frameFormat = SPI_POL0_PHA0; // for ADC
spiParams.transferMode = SPI_MODE_BLOCKING;
//spiParams.transferTimeout = SPI_WAIT_FOREVER;
spiParams.transferTimeout = 1000;
//spiParams.transferCallbackFxn = NULL;
spiParams.mode = SPI_MASTER;
spiParams.bitRate = 1000000000/18;
spiParams.dataSize = 8;
spiHandle = SPI_open(0, &spiParams);
if (!spiHandle)
{
printf("\n SPI_open failed. \n");
}
hwAttrs = (const SPI_v0_HWAttrs *)spiHandle->hwAttrs;
object = (SPI_v0_Object*)spiHandle->object;
// Definition of signal to be sent
/* Enable transfer */
//terminateXfer = 0;
xferEnable = 1;
SPI_control(spiHandle, SPI_V0_CMD_XFER_ACTIVATE, (void *)&xferEnable);
uint8_t transmitBuffer1[1];
uint8_t receiveBuffer[1];
transmitBuffer1[0] = (uint8_t)0x09;
transmitBuffer1[1] = (uint8_t)0xff;
transmitBuffer1[2] = (uint8_t)0xff;
transmitBuffer1[3] = (uint8_t)0x09;
transmitBuffer1[4] = (uint8_t)0x8b;
transmitBuffer1[5] = (uint8_t)0xb7;
spiTransaction1.txBuf = transmitBuffer1;
spiTransaction1.rxBuf = NULL;
spiTransaction1.count = 1;
terminateXfer = 1;
spiTransaction1.arg = (void *)&terminateXfer;
#ifdef SPI_DMA_ENABLE
if (dmaMode)
{
// CacheP_wb((void *)transmitBuffer1, (int32_t)1);
// CacheP_wb((void *)receiveBuffer, (int32_t)1);
}
#endif
#ifdef SPI_DMA_ENABLE
if (dmaMode == true)
{
//CacheP_Inv((void *)receiveBuffer, (int32_t)1);
}
#endif
while (loop)
{
retVal = SPI_transfer(spiHandle, &spiTransaction1);
//retVal = SPI_transfer(spiHandle, &spiTransaction2);
//retVal = SPI_transfer(spiHandle, &spiTransaction3);
//retVal = SPI_transfer(spiHandle, &spiTransaction4);
//transmitBuffer[0] = (uint8_t)0x0009;
//transmitBuffer[1] = (uint8_t)0xFFFF;
//transmitBuffer[2] = (uint8_t)0xFF;
//spiTransaction.txBuf = transmitBuffer;
//spiTransaction.rxBuf = NULL;
//retVal = SPI_transfer(spiHandle, &spiTransaction);
if (retVal == false){
printf("\nSPI transfer failed!\n");}
//printf("%x",receiveBuffer[0]);
if (retVal == true){
printf("\nSPI transfer completed!\n");}
//printf("%x",receiveBuffer[0]);
//printf("%d",receiveBuffer[0]);
}
/* Disable transfer */
xferEnable = 0;
SPI_control(spiHandle, SPI_V0_CMD_XFER_ACTIVATE, (void *)&xferEnable);
SPI_close(spiHandle);
}
/*
* ======== main ========
*/
#ifndef BARE_METAL
int main(void){
System_printf("Start Setup\n");
/* Call board init functions */
Board_initSPI();
/* Configure task. */
//Task_Params taskParams;
//Task_Params_init(&taskParams);
//taskParams.stack = myTaskStack;
//taskParams.stackSize = sizeof(myTaskStack);
//Task_construct(&myTaskStruct, spi_test, &taskParams, NULL);
System_printf("End Setup\n");
/* Start BIOS */
BIOS_start();
return (0);
}
#endif
#ifdef SPI_DMA_ENABLE
EDMA3_RM_Handle gEdmaHandle = NULL;
/**
* \brief Function to initialize the edma driver and get the handle to the
* edma driver;
*/
static EDMA3_RM_Handle MCSPIApp_edmaInit(void)
{
EDMA3_DRV_Result edmaResult = EDMA3_DRV_E_INVALID_PARAM;
uint32_t edma3Id;
if (gEdmaHandle != NULL)
{
return (gEdmaHandle);
}
edma3Id = 0;
gEdmaHandle = (EDMA3_RM_Handle)edma3init(edma3Id, &edmaResult);
if (edmaResult != EDMA3_DRV_SOK)
{
/* Report EDMA Error */
System_printf("\nEDMA driver initialization FAIL\n");
}
else
{
System_printf("\nEDMA driver initialization PASS.\n");
}
return(gEdmaHandle);
}
#endif
Kind regards,
Dejana



