



Hi there
I have a question on the 2p2z controller in the digital control library: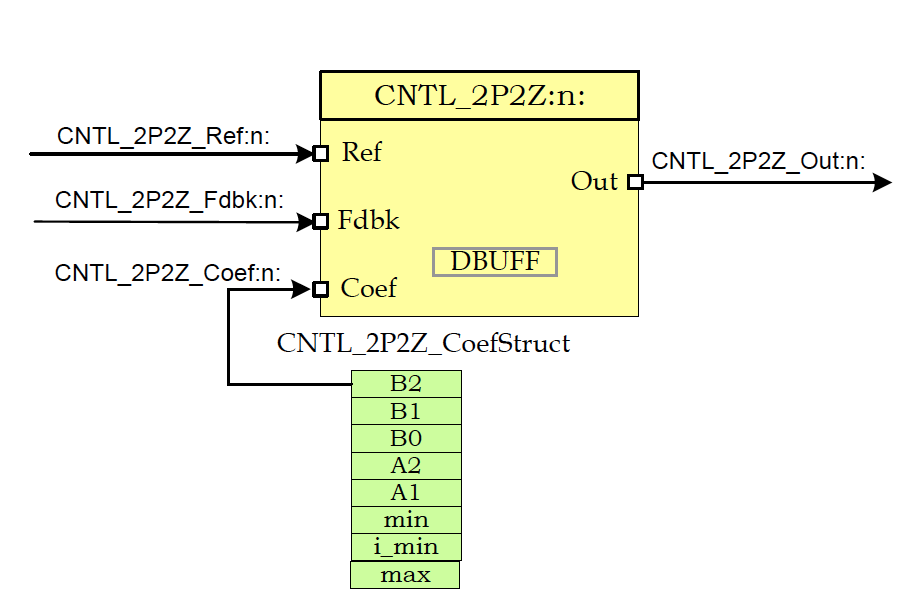
This controller calculates the output at every control cycle based on the discrete equation:

where u is the output and e is the input. At each control cycle then u(n-1), and u(n-2) as well as e(n-1) and e(n-2) are updated.
My question is: what about the coefficients a1, a2, b0, b1, b2? are they also updated at each control cycle? or are they calculated only once at the initialisation stage and then they remain always the same?
I am asking so, because I am mapping a PR controller to a 2p2z controller, and the coefficients a1, a2, b0, b1, b2 depend on the angular frequency (which is supposed to be fixed 2*pi*60 Hz) but however may have some variations from time to time.

So, I was wandering whether it is common practice to calculate a1, a2, b0, b1, b2 at each control cycle, or if this is incorrect.
Thank you so much for your help
