Part Number: AM3352
Hi
We have following issue with UART module in AM3352BZCZD60 processor on a custom board.
System MPU AM3352BZCZD60
UARTS in use: 5 ports (/dev/ttyO1 ÷ /dev/ttyO5) as Modbus RTU master
RS-485 transceivers: SN65HVD3082EDR
Linux kernel 4.19.94 from TI SDK am335x-evm-linux-sdk-src-06.03.00.106
toolchain gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf
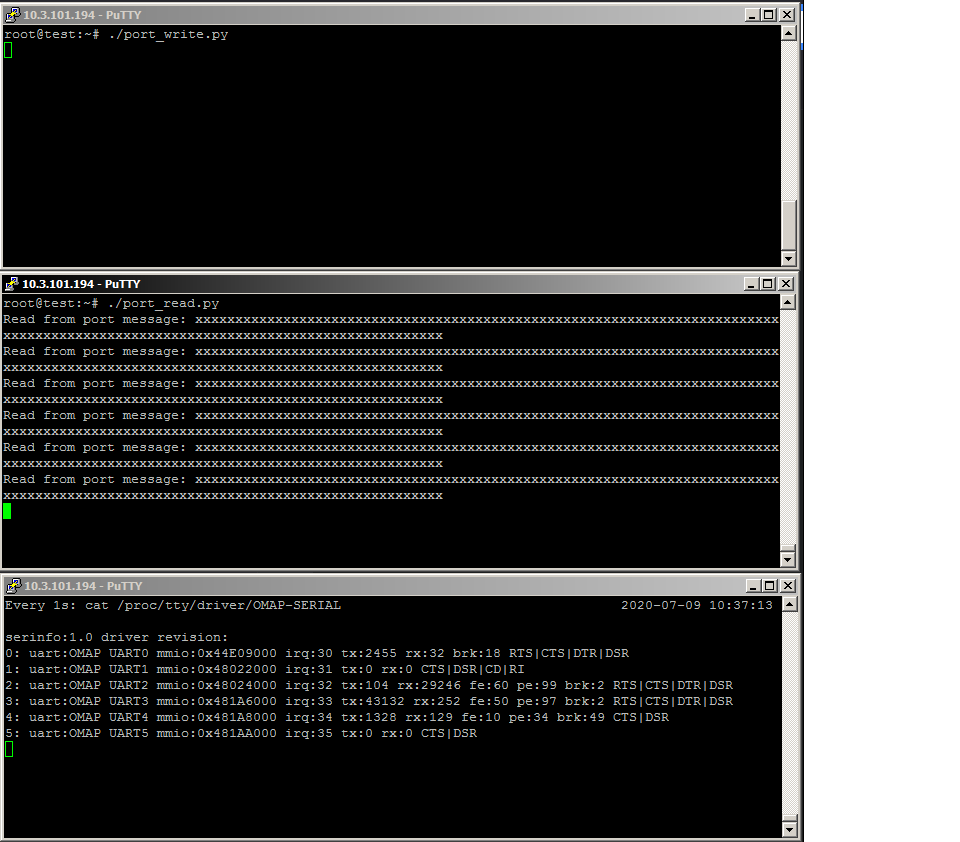
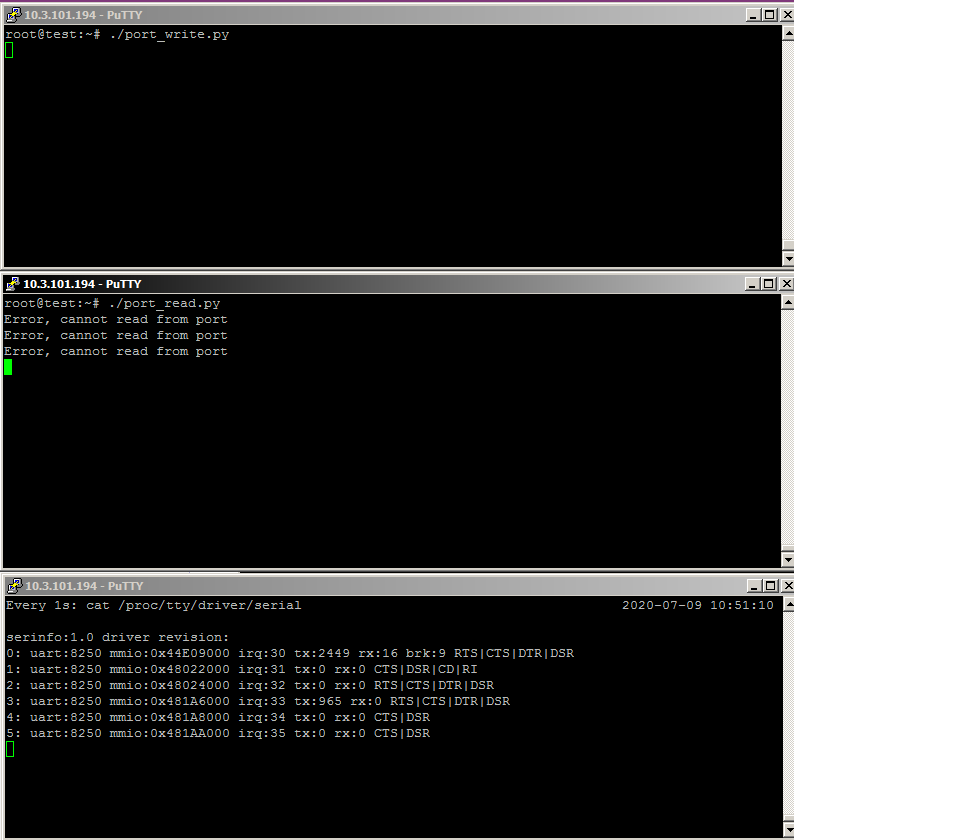
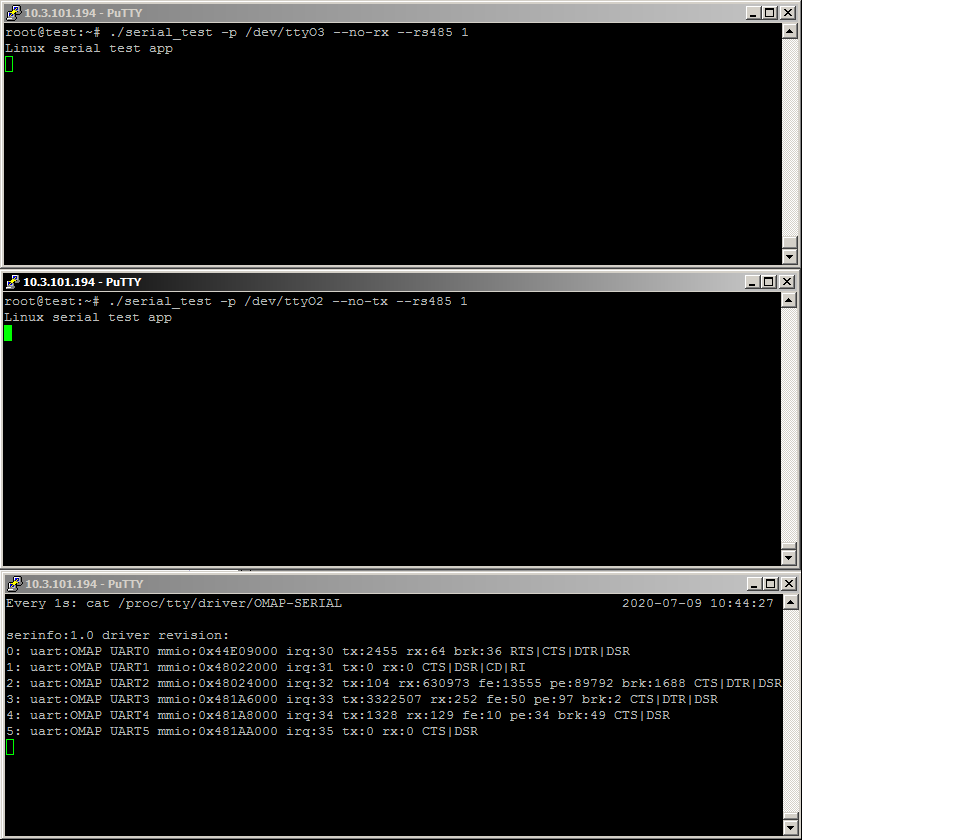
Issue found: Failure on single UART module after days of continuous communication with slaves at different baud rates (19200 … 115200). Port is found locked, no specific info in /var/log/messages or dmesg
Verified: RX/TX pins on RS-485 transceiver and on GPIO processor pins. Both are idle when trying to write to the serial port from Linux
RX, TX pins on transceiver before reboot - no communication
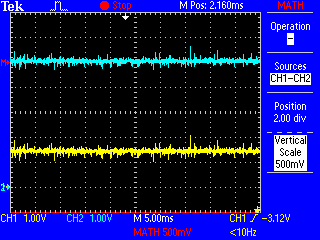
RX, TX GPIO pins on processor before reboot - no communication

RX, TX GPIO pins on processor after reboot - communication is back

Thank you in advance for any support in this topic. If some more information will be needed from the Linux kernel, we can read them from the board in a failure state.
Best Regards
Pawel