Hi,
The psdk version I use is psdk_rtos_auto_j7_07_00_00_11.
I wrote the MCAN0 test program according to the example of mcan_evm_loopback_app_main_k3.c, the baud rate is set to 500K, and I can currently receive the CAN data sent by the board on the PC.
But the problem is that my transmission does not start TX interrupt. The code to interrupt registration is as follows,
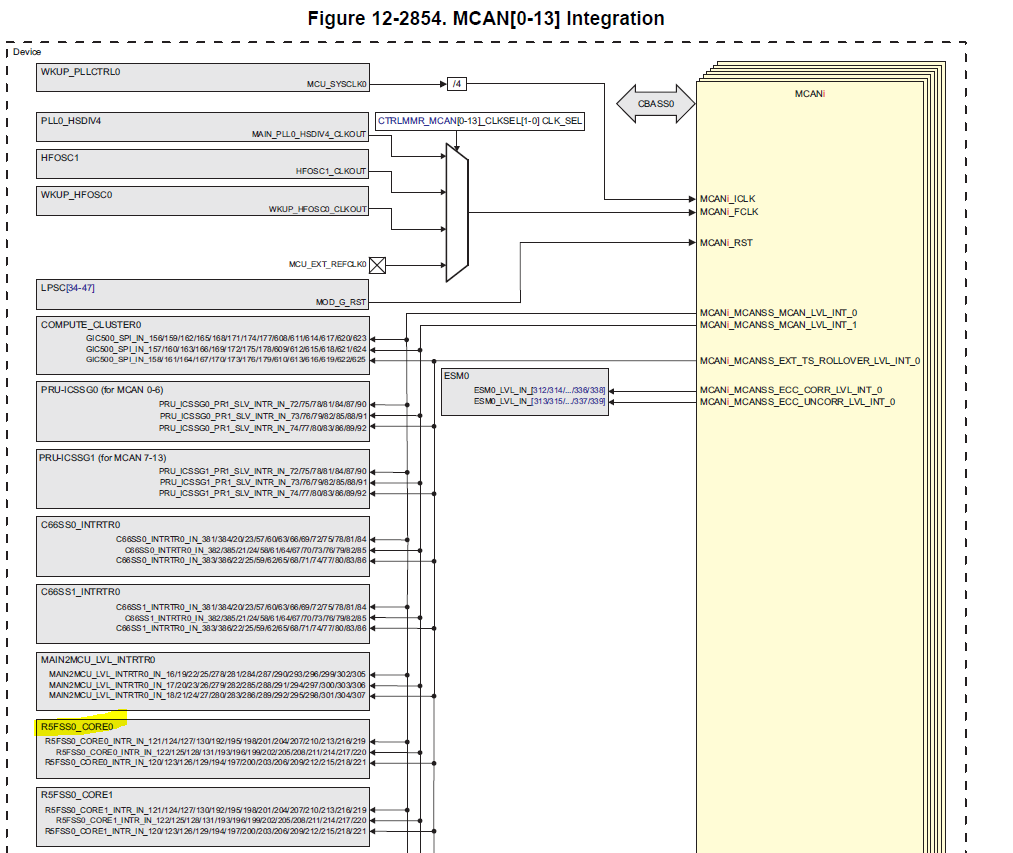
#define APP_MAIN_MCAN_0_INT0 (CSLR_R5FSS1_CORE0_INTR_MCAN0_MCANSS_MCAN_LVL_INT_0)
#define APP_MAIN_MCAN_0_INT1 (CSLR_R5FSS1_CORE0_INTR_MCAN0_MCANSS_MCAN_LVL_INT_1)
#define APP_MAIN_MCAN_0_TS_INT (CSLR_R5FSS1_CORE0_INTR_MCAN0_MCANSS_EXT_TS_ROLLOVER_LVL_INT_0)
static void McanIntr0ISR(uintptr_t arg)
{
uint32_t intrStatus;
VX_PRINT(VX_ZONE_ERROR, "INTERUPT");
intrStatus = MCAN_getIntrStatus(gMcanModAddr);
MCAN_clearIntrStatus(gMcanModAddr, intrStatus);
if (MCAN_INTR_SRC_TRANS_COMPLETE ==
(intrStatus & MCAN_INTR_SRC_TRANS_COMPLETE))
{
gMcanIsrIntr0Flag = 0U;
}
}
configStatus += App_mcanConfigureIrqRouter(TISCI_DEV_MCAN0, 0U, APP_MAIN_MCAN_0_INT0);
configStatus = App_mcanRegisterInterrupt(APP_MAIN_MCAN_0_INT0, &McanIntr0ISR);
configStatus += App_mcanRegisterInterrupt(APP_MAIN_MCAN_0_INT1, &McanIntr1ISR);
configStatus += App_mcanRegisterInterrupt(APP_MAIN_MCAN_0_TS_INT, &McanTSIntrISR);
The MCAN interface configuration code is as follows
boardCfg = BOARD_INIT_MODULE_CLOCK |
BOARD_INIT_PINMUX_CONFIG;
boardStatus = Board_init(boardCfg);
if (boardStatus != BOARD_SOK)
{
VX_PRINT(VX_ZONE_ERROR, "[Error] Board init failed!!\n");
}
configStatus = McanConfig();
/* Enable Interrupts */
MCAN_enableIntr(gMcanModAddr, MCAN_INTR_MASK_ALL, (uint32_t)TRUE);
MCAN_enableIntr(gMcanModAddr,MCAN_INTR_SRC_RES_ADDR_ACCESS, (uint32_t)FALSE);
/* Select Interrupt Line */
MCAN_selectIntrLine(gMcanModAddr,
MCAN_INTR_MASK_ALL,
MCAN_INTR_LINE_NUM_0);
/* Enable Interrupt Line */
MCAN_enableIntrLine(gMcanModAddr,
MCAN_INTR_LINE_NUM_0,
1U);
/* Enable Transmission interrupt */
configStatus = MCAN_txBufTransIntrEnable(gMcanModAddr,
1U,
(uint32_t)TRUE);
txMsg.dlc = loopCnt;
The can data sending code is as follows:
txMsg.id = (uint32_t)((uint32_t)(id) << 18U);
/* Write message to Msg RAM */
MCAN_writeMsgRam(gMcanModAddr, MCAN_MEM_TYPE_BUF, 1U, &txMsg);
/* Add request for transmission */
configStatus = MCAN_txBufAddReq(gMcanModAddr, 1U);
if (CSL_PASS != configStatus)
{
// App_ConsolePrintf("\nError in Adding Transmission Request...\n");
// break;
}
while (gMcanIsrIntr0Flag)
{}
Now we can correctly receive CAN data from the host computer, but the interrupt function McanIntr0ISR is not triggered.
1. Did we configure the interrupt number incorrectly?
2. Whether can provide correct MCAN interrupt configuration code, including TX and RX interrupt.
Thanks!