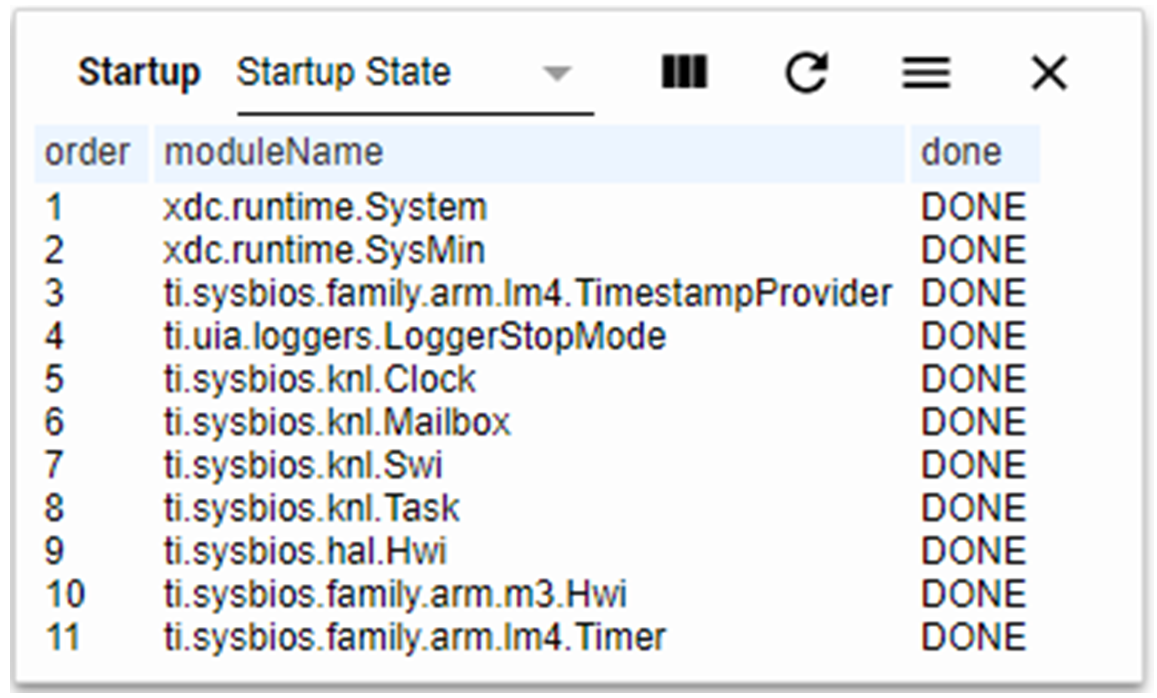
Sometimes when I run my TI-RTOS based application, I don't get to main(). Can you please explain what happens with a TI-RTOS based application before main() and how to debug the issue?

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.