


Part Number: TDA4VM
Tool/software: TI C/C++ Compiler
hello expert:
I use TDA4 R5F MCU0 on the board to develop the CANFD function in psdk_rtos_auto_j7_07_00_00_11/vision_apps,
the configuration of the arbitration phase:Baud rate 500k,sample point 80%,
the configuration of the data phase:Baud rate 2000k,sample point 75%.
In our development environment,only connect the CANoe to our ECU,use CANoe communicate to the ECU,the CANFD is well.
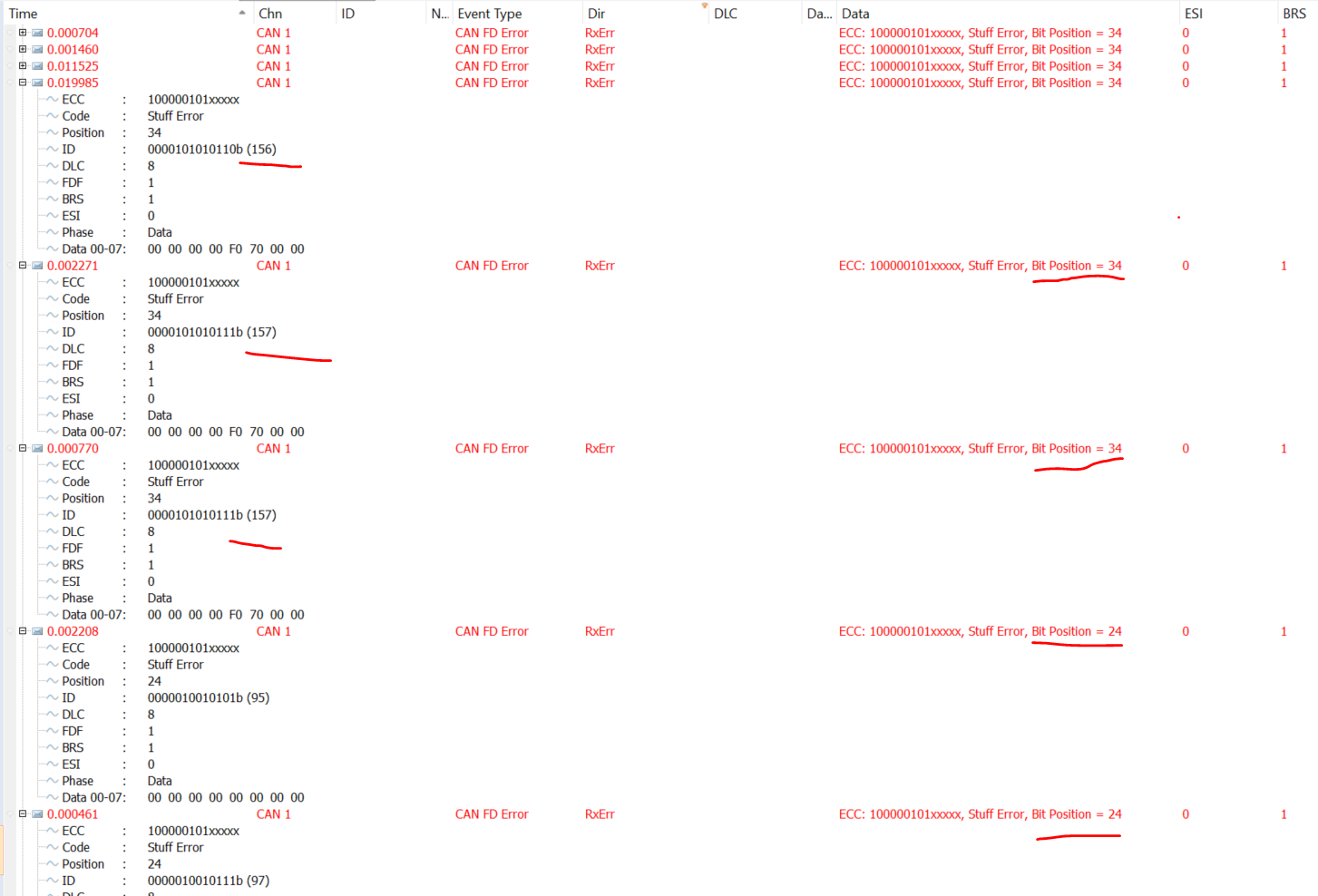
when I test our ECU on the custom vehicle bench,there are many error frames on the CAN bus please see the picture below:

but remove our ECU from the custom vechicle bench,the error frames dissappear,The error frame is analyzed in detail,most
error are Stuff Error and sent by our ECU(0x156,0x157,0x1e6.0x1e7),andThe location of the error occurs in the data segment
(for example Bit position 34,24),please see the picture below:
Have you ever had a problem like this?Is there any solution for this?
Please let me know if there is any unclear description,thans o lot.

