- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
SDK : PROCESSOR_SDK_VISION_03_05_00_00
Config : tda2xx_evm_bios_all
SOC : TDA2SX
OS : Windows7
Hi,
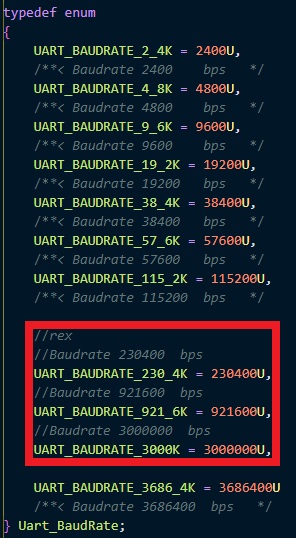
In my test, I need to add some specific baud rate for my application of UART RX, then I successfully added the non-preset baud rate, as shown below.
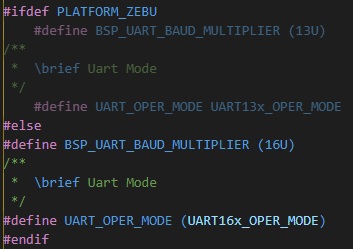
I have modified the following 6 files in total.
ti_components\drivers\pdk_01_10_01_06\packages\ti\drv\bsp_lld\uart\bsp_uart.h
ti_components\drivers\pdk_01_10_01_06\packages\ti\drv\bsp_lld\uart\src\bspdrv_uart.c
ti_components\drivers\pdk_01_10_01_06\packages\ti\drv\bsp_lld\uart\unit_test\uartUt\testInput\st_uartConfig.h
ti_components\drivers\pdk_01_10_01_06\packages\ti\drv\bsp_lld\uart\unit_test\uartUt\testLib\st_uart.h
ti_components\drivers\pdk_01_10_01_06\packages\ti\drv\bsp_lld\uart\unit_test\uartUt\testLib\st_uartCommon.c
ti_components\drivers\pdk_01_10_01_06\packages\ti\drv\bsp_lld\uart\unit_test\uartUt\testLib\st_uartParser.c
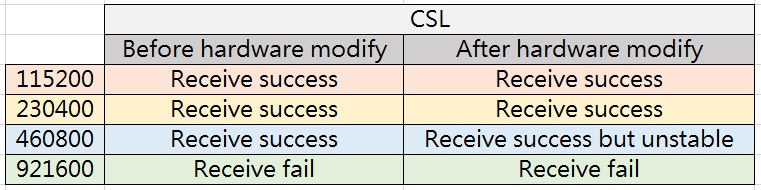
Let’s not talk about the changes. Anyway, I’m pretty sure that 230400 bps can be use after my changes.
But I can't use the 921600 bps and 3000000 bps, I’m pretty sure that the TX side on the PC supports 3000000 bps.
Then I saw the table on TRM.
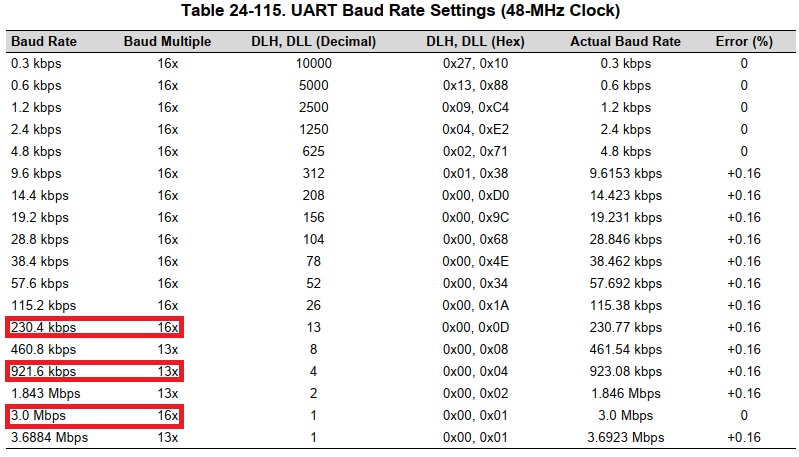
What does that 16X 13X represent?
How do I know which category I am?
Does this mean that if I want to use 921600 bps, I must switch to 13X?
How do I switch?
If I can use 230400 bps, does that mean I am 16X? Then why can't I use 3000000 bps?
I'm sorry I asked so many questions at once, but I really need these answers.
Please help me solve these problems, Thanks.