Part Number: PROCESSOR-SDK-TDAX
Hello all,
I have few queries.
1) Please explain me about input_target_ptr and input_desc parameters in the target files generated using PyTIOVX tool.
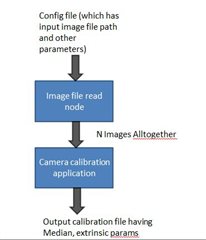
2) Below is the block diagram for my application.I have divided into 4 nodes.
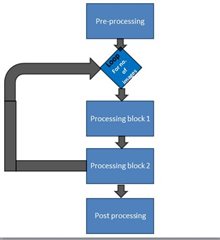
For image reading and passing, should i create a separate node?
I am confused. Please provide some clarity on the same.
Regards,
Padmasree N.