I have followed the underlying steps but still unable to transmit/receive data on the MCAN. Please point out where i have made a mistake or have i missed any step here?
1. Took the contents of the .dtsi file generated from the PINMUX Tool and pasted the contents in the respective .dts files in the Kernel (arch/arm64/boot/dts/ti/k3-am654-base-board.dts and k3-am654-idk.dtso )and the U-Boot folders(arch/arm/dts/k3-am654-base-board.dts and arch/arm/dts/k3-am654-r5-base-board.dts).
2. Compiled the U-BOOT through SDK.
3. Build the kernel, created the Image file, build the modules and installed them.
4. Installed the kernel with the rootFS.
5. Copied the rootFS and the .dtb file to the to SD card
6. Then booted the kernel from the SD Card
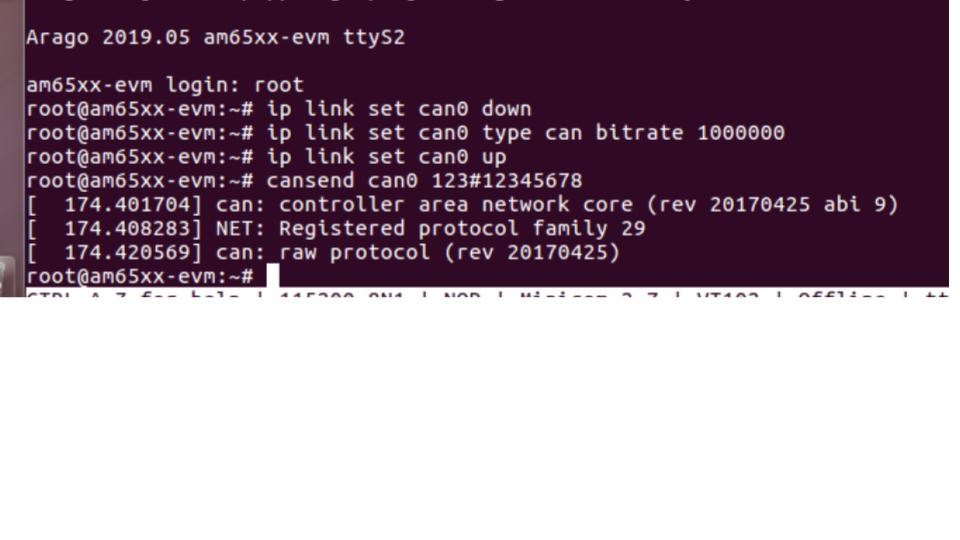
After this I connected a CAN tool to the EVM and tried to send data using the following set of commands:
i. ip link set can0 type can bitrate 1000000
ii. ip link set can0 up
iii. cansend can0 123#DEADBEEF
I did not get any data on the other end. Where am i making the mistake?
Also, there is no LED glowing on the EVM Daughter Board. How can we be sure that the board is powered?