



I am curious to the meaning of the "PRI" parameter in the ros driver. The calculation presented is
float PRI = (idleTime + rampEndTime) * 1e-6;
From the sdk, particularly this image: 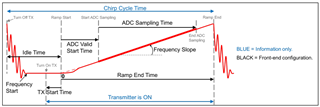
I've come to the conclusion that this must be the "chirp cycle time", as this image illustrates the total "chirp cycle time" as consisting of "idle time" and "ramp end time". But then I am unaware of the acronym "PRI", and have been unable to find it used anywhere else.
