Hi,
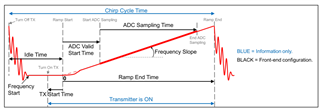
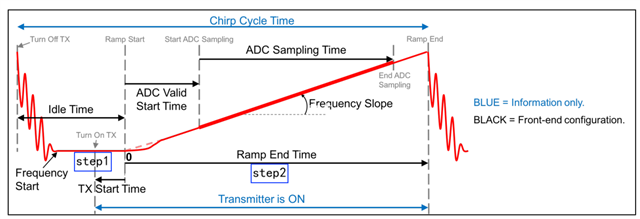
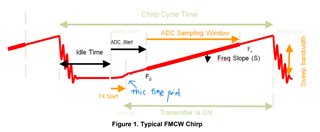
If I just need send the FMCW signal and don't need recevie the reflect signal and any sequent signal processing. In the following figure, it means we just need turn on the TX, and don't need the ramp time any more. Hence, we can send the FMCW signal at very high speed.
Am I right? How can I achieve it? Thanks.