Hello,everyone.I think i need you help.Thanks!
When I tracked the vehicle with iwr1642, I found that one vehicle became two vehicles side by side during the movement, and their distance and speed to the radar installation location were consistent. Which parameters are set incorrectly to cause this?What are the parameters related to this situation?
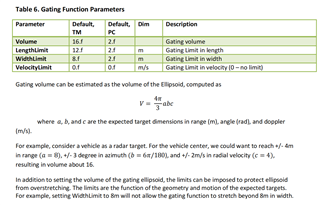
My radar tracking algorithm parameter settings are shown in the figure below

In addition to increasing the signal-to-noise ratio, what parameters can be modified to avoid this?
Regards,
ctc