Other Parts Discussed in Thread: AWR1843
My firmware is based on the automotive MRR lab demo. I compared the performance of my AWR1843 Radar sensor with below different configuration settings:
cfg1:
| DETECTION DISTANCE | START_FREQ_GHZ | RAMP_END_TIME_VAL(us) | FREQ_SLOPE_MHZ_PER_US(mhz/us) | bandwidth(mhz) | max freq(ghz) |
| 30 | 77.01 | 44 | 50.01 | 2200.44 | 80.96044 |
cfg2:
| DETECTION DISTANCE | START_FREQ_GHZ | RAMP_END_TIME_VAL(us) | FREQ_SLOPE_MHZ_PER_US(mhz/us) | bandwidth(mhz) | max freq(ghz) |
| 30 | 78.76 | 44 | 50.01 | 2200.44 | 80.96044 |
The Start frequency is set to 77.01GHz and 78.76 GHz respectively in USRR30.h, both bandwidths are located in the VCO2 frequency range 77~81GHz
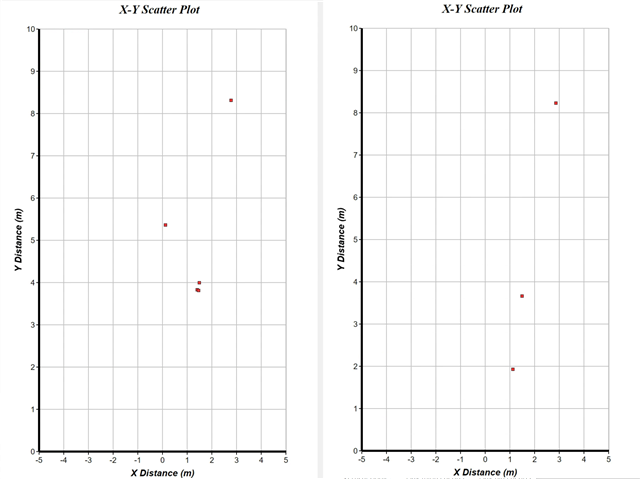
I expect to get the same test results: showing the same detected objects. However, they are not the same. the radar sensor with cfg2 shows some non-existed detected objects while the same sensor with cfg1(default setting of MRR demo) shows correct detected objects.
Do I need to change the calibration parameters when the start frequency is changed? How to fix this issue?
Kind regards