Other Parts Discussed in Thread: DRV5055, TMAG5170, TMAG5110, TMAG5111
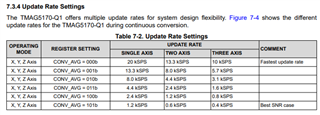
- Is TMAG5055 capable to use like encoder? Can it detect changing magnetic field at 10000rpm? (if the magnetic field is within the sensor limit)
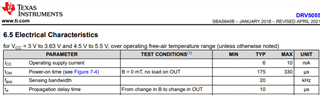
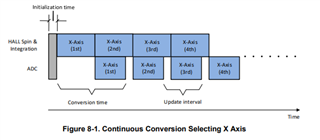
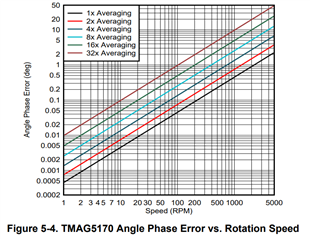
- The sensor is linear in nature, whereas its application would be position sensing of magnet. Will there be any delay in the output of sensor at 10000rpm?