Hi team,
Here's an issue from the customer may need your help:
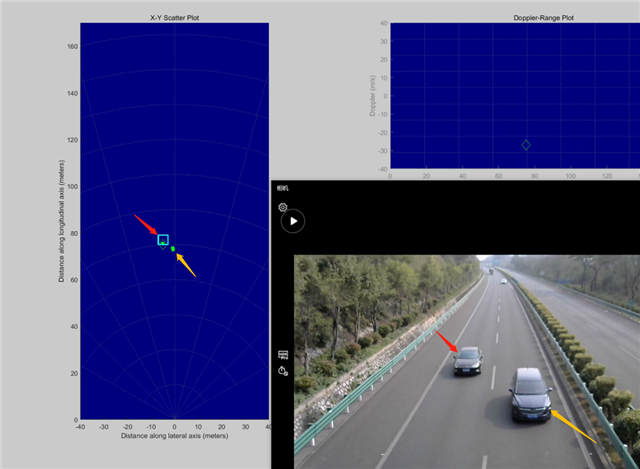
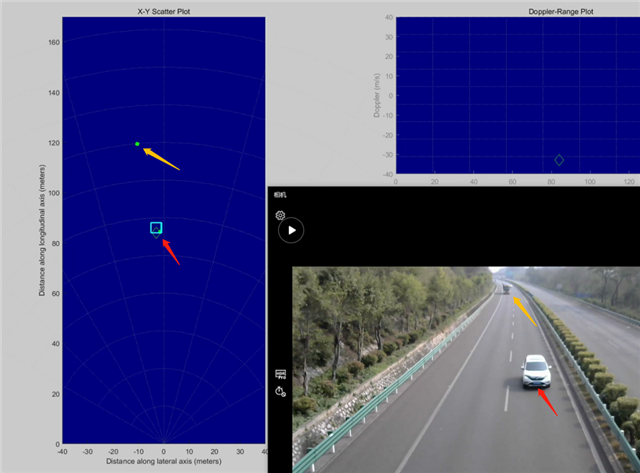
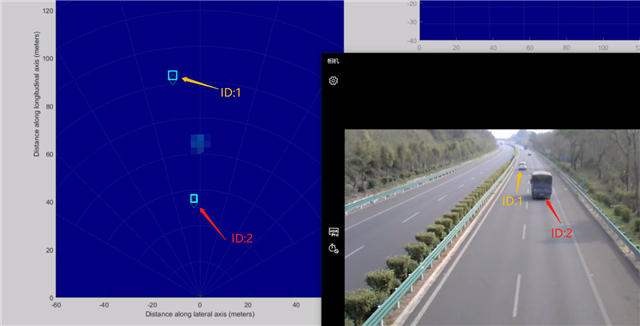
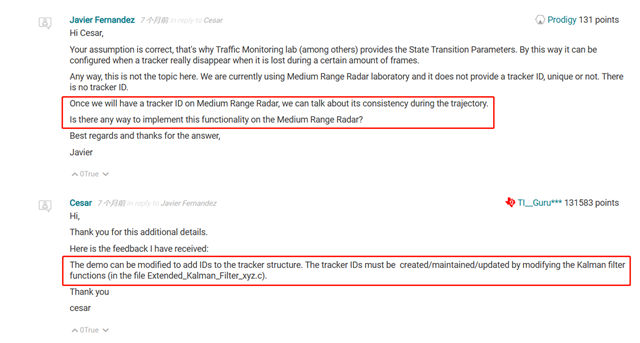
Test demo for medium_range_radar and demo for Traffic_Monitoring with IWR1843 development board. Medium_range_radar was observed with a little cloud data, clustering target output, but the target was not assigned ID and tracking management through the visualizer. However, Traffic_Monitoring has an ID assigned to the target and tracking management.
Is it possible to port the assigned target ID and trace management functions for Traffic_Monitoring to medium_range_radar for similar functions? Is there another way to do assigning IDs to targets and tracking management?
When testing demo for medium_range_radar, the visualizer does not display the same number of targets when there are many targets in the vehicle. Is the target detected missing or is it limited by the associated code? Is there any way to increase the number of targets? And also when testing demo for Traffic_Monitoring, the Visualizer will get stuck if the vehicle has many targets.
Could you help check this case? Thanks.
Best Regards,
Cherry