Other Parts Discussed in Thread: IWR6843ISK
Hi,
I am trying to modify the 3D_people_count_6843_mss project so that I can communicate with the sensor via I2C in slave mode.
I've added this in the MmwDemo_uartTxTask function:
I2CSlave_Handle i2cHandle;
I2CSlave_Params i2cParams;
bool retVal = false;
int32_t errCode = 0;
uint32_t arg;
uint8_t rxData[100];
uint8_t txData[100];
Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINF13_PADAH, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);
Pinmux_Set_FuncSel(SOC_XWR68XX_PINF13_PADAH, SOC_XWR68XX_PINF13_PADAH_I2C_SDA);
Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PING14_PADAI, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);
Pinmux_Set_FuncSel(SOC_XWR68XX_PING14_PADAI, SOC_XWR68XX_PING14_PADAI_I2C_SCL);
/* Reset the transmit and receive buffer */
memset(&rxData, 0, sizeof (rxData));
/* Initialize the I2C Slave driver */
I2CSlave_init();
/* Initialize the I2C driver default parameters */
I2CSlave_Params_init(&i2cParams);
i2cParams.transferMode = I2CSLAVE_MODE_BLOCKING;
i2cParams.slaveAddress = 0x48;
/* Open the I2C Slave driver */
i2cHandle = I2CSlave_open(0, &i2cParams);
char hak[20] = "what?";
if (i2cHandle == NULL)
{
strcat(hak, "NULL");
//System_printf ("Error: I2C Driver Open failed\n");
//return -1;
}
System_printf ("Debug: I2C Slave Open passed\n");
arg = 1;
errCode = I2CSlave_control (i2cHandle, I2C_CMD_ADDR_MODE, (void* )&arg);
and added the blocking line:
txData[0] = 0x69; I2CSlave_read_write(i2cHandle, rxData, txData, 1); // Wait for master's poke and send the number of bytes to be transferred next
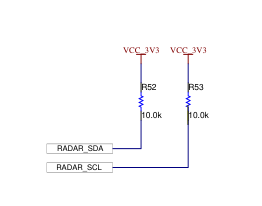
I've connected the SDA and SCK lines to my MCU based on this (4.7kΩ pull-ups connected):

Here's the full function which is the only part I have modified so far:
/** @brief Transmits detection data over UART
*
* @param[in] uartHandle UART driver handle
* @param[in] result Pointer to result from object detection DPC processing
* @param[in] timingInfo Pointer to timing information provided from core that runs data path
*/
void MmwDemo_uartTxTask(UArg arg0, UArg arg1)
/*static void Pcount3DDemo_transmitProcessedOutput
(
UART_Handle uartHandle,
Pcount3DDemo_output_message_UARTpointCloud *result,
uint32_t frameIdx,
uint8_t subFrameIdx,
Pcount3DDemo_output_message_stats *timingInfo
)*/
{
UART_Handle uartHandle;
MmwDemo_output_message_header header;
uint32_t tlvIdx = 0;
uint32_t packetLen, subFrameIdx, frameIdx;
MmwDemo_output_message_stats *timingInfo;
MmwDemo_output_message_compressedPointCloud_uart *objOut;
uint32_t targetListLength=0, targetIndexLength=0, presenceIndLength=0, targetHeightLength=0;
volatile uint32_t startTime;
MmwDemo_output_message_tl tl;
/* Clear message header */
memset((void *)&header, 0, sizeof(MmwDemo_output_message_header));
/* Header: */
header.platform = 0xA6843;
header.magicWord[0] = 0x0102;
header.magicWord[1] = 0x0304;
header.magicWord[2] = 0x0506;
header.magicWord[3] = 0x0708;
header.version = MMWAVE_SDK_VERSION_BUILD |
(MMWAVE_SDK_VERSION_BUGFIX << 8) |
(MMWAVE_SDK_VERSION_MINOR << 16) |
(MMWAVE_SDK_VERSION_MAJOR << 24);
/* wait for new message and process all the messages received from the peer */
while(1)
{
uint32_t numTargets, numIndices;
uint8_t *tList;
uint8_t *tIndex;
uint8_t *tHeight;
Semaphore_pend(gMmwMssMCB.uartTxSemHandle, BIOS_WAIT_FOREVER);
startTime = Cycleprofiler_getTimeStamp();
tlvIdx = 0;
uartHandle = gMmwMssMCB.loggingUartHandle;
objOut = &(gMmwMssMCB.pointCloudToUart);
subFrameIdx = gMmwMssMCB.currSubFrameIdx;
timingInfo = &gMmwMssMCB.subFrameStats[subFrameIdx].outputStats;
frameIdx = gMmwMssMCB.frameStatsFromDSP->frameStartIntCounter;
packetLen = sizeof(MmwDemo_output_message_header);
numTargets = gMmwMssMCB.numTargets;
numIndices = gMmwMssMCB.numIndices;
tList = (uint8_t*)gMmwMssMCB.trackerOutput.tList[gMmwMssMCB.trackerOutput.currentDescr];
tIndex = (uint8_t*)gMmwMssMCB.trackerOutput.tIndex[gMmwMssMCB.trackerOutput.currentDescr];
#ifdef HEIGHT_DETECTION_ENABLED
tHeight = (uint8_t*)gMmwMssMCB.trackerOutput.tHeight[gMmwMssMCB.trackerOutput.currentDescr];
#endif
if (objOut->header.length > 0)
{
packetLen += sizeof(MmwDemo_output_message_tl) + objOut->header.length;
tlvIdx++;
}
if (numTargets > 0)
{
targetListLength = numTargets*sizeof(trackerProc_Target);
packetLen += sizeof(MmwDemo_output_message_tl) + targetListLength;
tlvIdx++;
}
if ((numIndices > 0) && (numTargets > 0))
{
targetIndexLength = numIndices*sizeof(trackerProc_TargetIndex);
packetLen += sizeof(MmwDemo_output_message_tl) + targetIndexLength;
tlvIdx++;
}
#ifdef HEIGHT_DETECTION_ENABLED
if (numTargets > 0)
{
targetHeightLength = numTargets*sizeof(heightDet_TargetHeight);
packetLen += sizeof(MmwDemo_output_message_tl) + targetHeightLength;
tlvIdx++;
}
#endif
if(gMmwMssMCB.presenceDetEnabled)
{
presenceIndLength = sizeof(uint32_t);
packetLen += sizeof(MmwDemo_output_message_tl) + presenceIndLength;
tlvIdx++;
}
header.numTLVs = tlvIdx;
header.totalPacketLen = packetLen;
header.frameNumber = frameIdx;
header.subFrameNumber = subFrameIdx;
header.numDetectedObj = gMmwMssMCB.numDetectedPoints;
// haki
I2CSlave_Handle i2cHandle;
I2CSlave_Params i2cParams;
bool retVal = false;
int32_t errCode = 0;
uint32_t arg;
uint8_t rxData[100];
uint8_t txData[100];
Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINF13_PADAH, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);
Pinmux_Set_FuncSel(SOC_XWR68XX_PINF13_PADAH, SOC_XWR68XX_PINF13_PADAH_I2C_SDA);
Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PING14_PADAI, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);
Pinmux_Set_FuncSel(SOC_XWR68XX_PING14_PADAI, SOC_XWR68XX_PING14_PADAI_I2C_SCL);
/* Reset the transmit and receive buffer */
memset(&rxData, 0, sizeof (rxData));
/* Initialize the I2C Slave driver */
I2CSlave_init();
/* Initialize the I2C driver default parameters */
I2CSlave_Params_init(&i2cParams);
i2cParams.transferMode = I2CSLAVE_MODE_BLOCKING;
i2cParams.slaveAddress = 0x48;
/* Open the I2C Slave driver */
i2cHandle = I2CSlave_open(0, &i2cParams);
char hak[20] = "what?";
if (i2cHandle == NULL)
{
strcat(hak, "wdad");
//System_printf ("Error: I2C Driver Open failed\n");
//return -1;
}
System_printf ("Debug: I2C Slave Open passed\n");
arg = 1;
errCode = I2CSlave_control (i2cHandle, I2C_CMD_ADDR_MODE, (void* )&arg);
//I2CSlave_close(i2cHandle);
// hako
while (1) {
/* Send packet header */
UART_write (uartHandle,
(uint8_t*)&header,
sizeof(MmwDemo_output_message_header));
UART_write (uartHandle, (uint8_t*)hak, strlen(hak));
txData[0] = 0x69;
// haki &header.totalPacketLen
I2CSlave_read_write(i2cHandle, rxData, txData, 1); // Wait for master's poke and send the number of bytes to be transferred next
// I2CSlave_write(i2cHandle, , header.totalPacketLen);
// hako
}
/* Send detected Objects */
if (objOut->header.length > 0)
{
UART_write (uartHandle,
(uint8_t*)objOut,
objOut->header.length + sizeof(MmwDemo_output_message_tl));
}
Task_sleep(1);
/*Send Tracker information*/
if (numTargets > 0)
{
tl.type = MMWDEMO_OUTPUT_MSG_TRACKERPROC_3D_TARGET_LIST;
tl.length = targetListLength;
UART_write(uartHandle, (uint8_t*)&tl, sizeof(MmwDemo_output_message_tl));
UART_write(uartHandle, tList, targetListLength);
GPIO_toggle(gMmwMssMCB.cfg.platformCfg.SensorStatusGPIO);
/* Send Target Height TLV if enabled*/
#ifdef HEIGHT_DETECTION_ENABLED
tl.type = MMWDEMO_OUTPUT_MSG_TRACKERPROC_TARGET_HEIGHT;
tl.length = targetHeightLength;
UART_write(uartHandle, (uint8_t*)&tl, sizeof(MmwDemo_output_message_tl));
UART_write(uartHandle, tHeight, targetHeightLength);
#endif
}
/*Send Tracker Index Information*/
if ((numIndices > 0) && (numTargets > 0))
{
tl.type = MMWDEMO_OUTPUT_MSG_TRACKERPROC_TARGET_INDEX;
tl.length = targetIndexLength;
UART_write(uartHandle, (uint8_t*)&tl, sizeof(MmwDemo_output_message_tl));
UART_write(uartHandle, tIndex, targetIndexLength);
}
/* Send Presence TLV if presence detect is enabled */
if(gMmwMssMCB.presenceDetEnabled)
{
tl.type = MMWDEMO_OUTPUT_MSG_PRESCENCE_INDICATION;
tl.length = presenceIndLength;
UART_write(uartHandle, (uint8_t*)&tl, sizeof(MmwDemo_output_message_tl));
UART_write(uartHandle, (uint8_t*)&(gMmwMssMCB.presenceInd), sizeof(uint32_t));
}
gMmwMssMCB.uartProcessingTimeInUsec = (Cycleprofiler_getTimeStamp() - startTime)/R4F_CLOCK_MHZ;
}
}
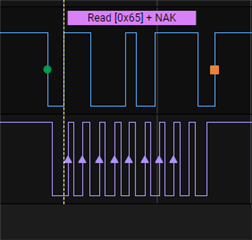
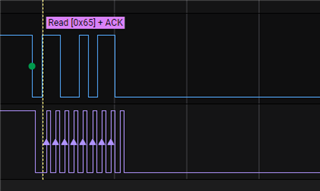
Slave address is 0x48 and so the byte transmitted in the I2C message is 0x91.
So in short, I initialize the I2C parameters and then wait for an I2C message from the master (my MCU). After I give the message I receive a NACK signal from the sensor however.
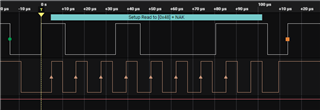
Is there something obvious that I am doing wrong?
thanks