Hello All,
I am working on PGA450Q1EVM-S sensor and I'm doing some preliminary tests to understand how it works and how to configure it.
Here is what I'm doing:
- In response to Cmd0, I am getting correct response e.g. 18 52 185. That means UART communication is fine
My current EEPROM has default configuration.
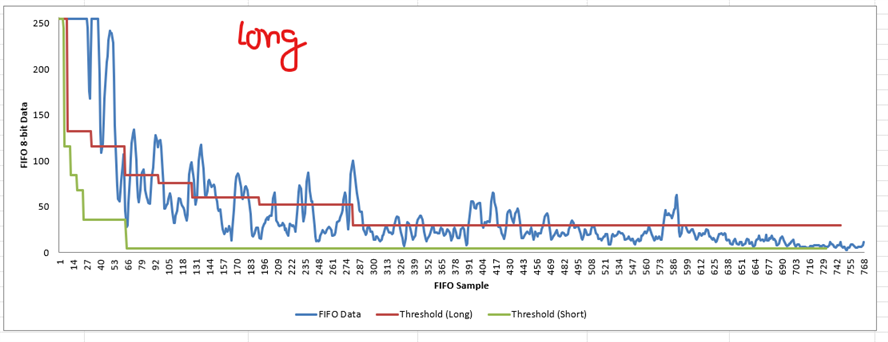
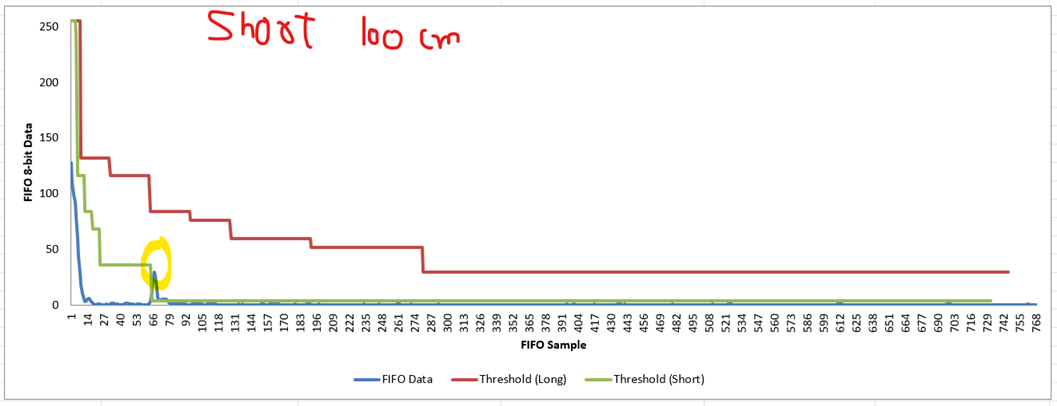
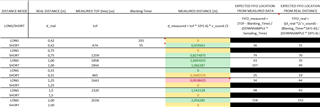
- Using Cmd1 I trigger short and long burst and using cmd2 reading corresponding TOF and using Cmd4 reading the FIFO. Here I am not getting consistent results.
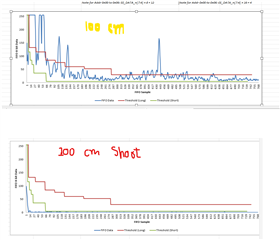
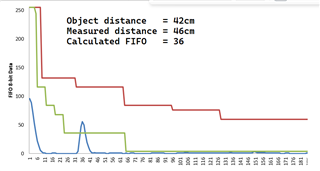
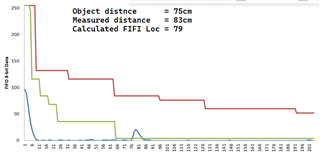
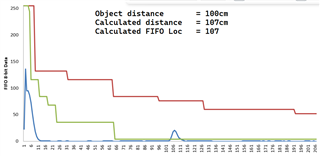
I have placed an object 100cm wide. As I understood when I trigger a Long burst using Cmd1 and reading the corresponding TOF using Cmd2. I am getting ''35 32 188''. So I am considering 35 as LSB and 32 as MSB, and by using distance formula I'm getting distance as around 150cm. Am I doing it correctly ?
Also I believe I have to update Threshold according to our system needs, But I am not sure how Threshold values shall be calculated?
So my question is How to calculate optimised Threshold values?
Best,
Taimur