Part Number: AWRL1432
Other Parts Discussed in Thread: AWR1642
Hi,
I am working on the MMW demo in SDK 5.3, using BPM mode. I am trying to get the data for angle FFT from the SDK.
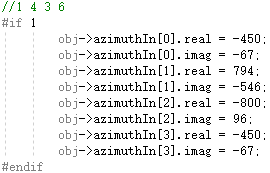
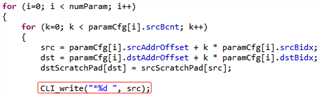
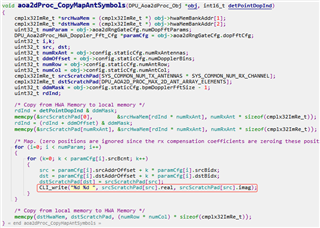
I first determined the range index based on the distance of the corner reflector in the darkroom, and then output the data corresponding to this range index in the aoa2dProc_CopyMapAntSymbols() function, that is, srcScratchPad [src].real and srcScratchPad[src].imag, as shown below:
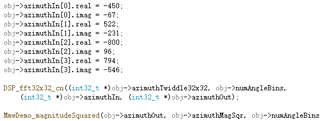
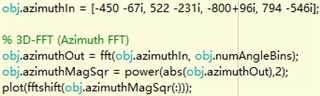
One set of data is as follows: -450 -67, 522 -231, -800 96, 794 -546, -450 -67, -450 -67, 600 34, -684 342.
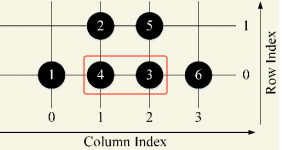
There are 8 channels of data. According to my understanding of the code, I think the first 4 channels are azimuth dimension data.
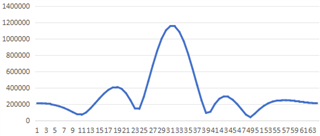
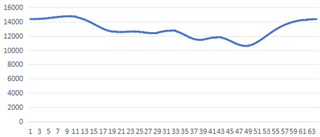
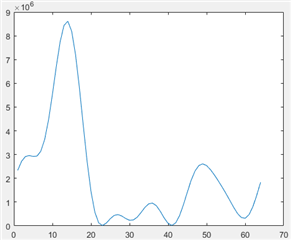
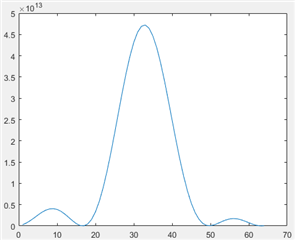
However, after I did FFT on the data of the first 4 channels, the angle I finally got was wrong.
I'm considering using other algorithms instead of FFT to get better angle accuracy, so I'm hoping you could help me confirm if the way I'm getting the data is correct, and if not, how should I get the data?
Thaks!