HI ,I am developing application to read magnetic field using TMAG5273 with 40mT range.
my register settings as per below.
0x00 -> 0x34
0x01->0x02
0x02->0x70
When I am reading the register with I2C it gives following result. I have multiplied the reading with (40000/32768) to get result in uT.
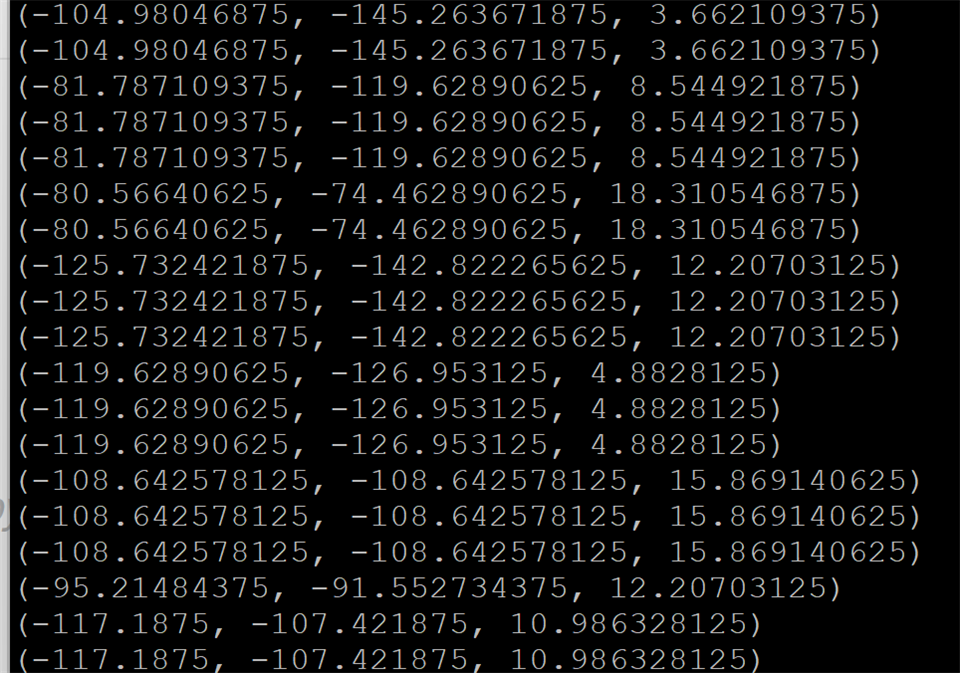
V
I have noticed the value fluctuates around 50-70uT. Is there any particular reason for this fluctuation? I am aiming to get 2uT deviation when there is no magnet around. Let me know if you need further information.
I am using default setting in all registers.
Please clarify and suggest a better solution if there is any.
Thank you