Hi,
I am trying to sync two AWR 1843 radars, following https://software-dl.ti.com/jacinto7/esd/robotics-sdk/08_05_00/docs/source/docs/multi_sensor_time_synchronization.html.
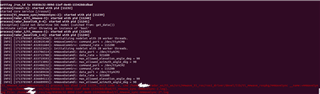
And i am doing the SW approach. but it given the following error :

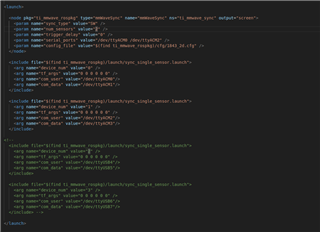
after i looked at the CMakeLists i found that, mmWaveSync was not added to the it as shown :
But when i added it to the CMakeLists, it give and include error :
ti_mmwave_rospkg/include/mmWaveSync.h:18:10: fatal error: GPIO.h: No such file or directory
18 | #include <GPIO.h>

When can i found, missing header file so i test the sw sync option.
Second question is : is there any other options to sync multiple radars, rather than what is given in the above page ?
Thanks, Dev Team @aitonomi !