Tool/software:
Hi there,
Regarding the gesture_recognition example, I have two questions as follows:
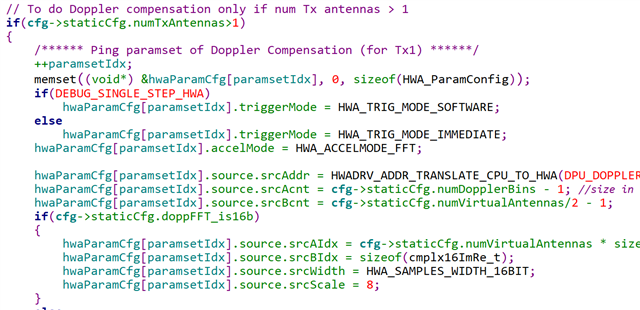
1. Before entering AOA HWA, doppler compensation will be performed on the virtual array (the default waveform is TDM excitation and requires compensation).
I output the values that need to be compensated for each virtual array(), but found that the compensation values output in each frame are different. I would like to ask how this part of the mechanism works?
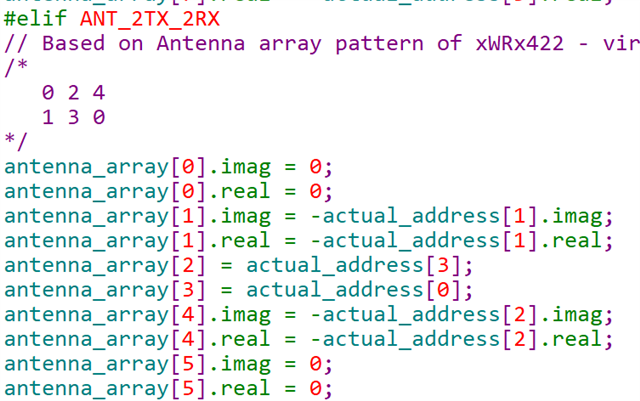
2. Currently, the gesture mode in gesture_recognition defaults to 2TX_2RX antenna. How will the phase change with this arrangement?
3. After reading the gesture_recognition doc, I found that the document specifically states that TX2RX2 has phase inversion. Can you please explain in detail, or is there any other document that I can refer to?
![]()
Best Wishes,
Chen