Other Parts Discussed in Thread: IWRL6432, SYSCONFIG, UNIFLASH,
Tool/software:
Based on my last question - about reading information from TLVs on a Rapsberry pi:
Hi everyone,
I've been doing some digging:
Question 1)
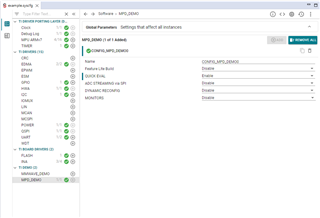
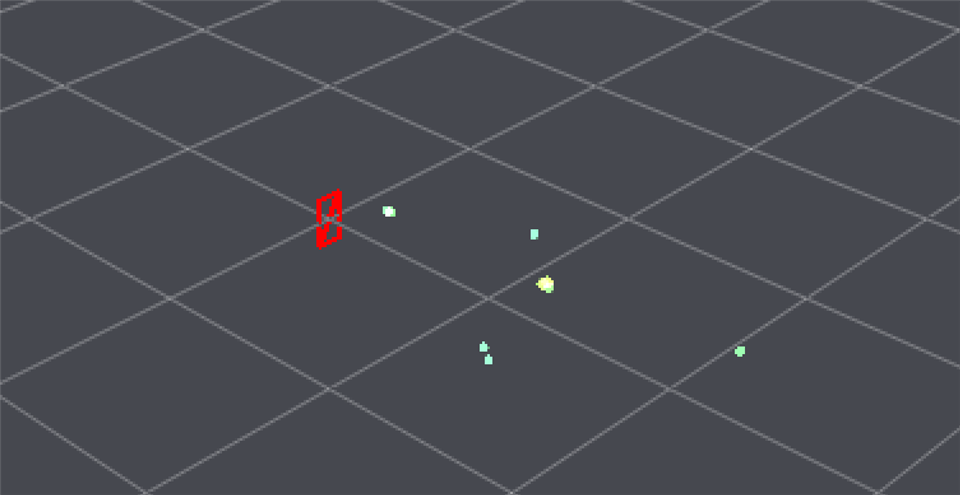
If you want to use a raspberry Pi to connect to IWRL6432 boost, and read the data and print Detected Objects, then you need to use a parser such as the ones in the Radar Toolbox e.g. tlvParser.py.
Python files like main_gui.py - do NOT contain the parser (no reference to detected objects in that python file).
Question 2)
This is all in the Radar Toolbox section - there are no Python files in the SDK - correct?