



Other Parts Discussed in Thread: CODECOMPOSER
Tool/software:
Unfortunately, I am still having problems with data transfer via SPI. I am using the 6432AOP Board with the True Ground Speed Demo and the matching.cfg: "true_ground_speed_5m_60GHz_aop".
1)I am using the Demo with "adcLogging 2" & "lowPowerCfg 0"
sensorStop 0
% <RxChCtrlBitMask>-<TxChCtrlBitMask>-<MiscCtrl>
channelCfg 7 3 0
% <DigOutputSampRate>-<DigOutputBitsSel>-<DfeFirSel>-<NumOfAdcSamples>-<ChirpTxMimoPatSel>-<ChirpRampEndTime>-<ChirpRxHpfSel>
chirpComnCfg 8 0 0 256 4 24.3 3
% <ChirpIdleTime>-<ChirpAdcSkipSamples>-<ChirpTxStartTime>-<ChirpRfFreqSlope>-<ChirpRfFreqStart>
chirpTimingCfg 28 37 0 160 58
% <NumOfChirpsInBurst>-<NumOfChirpsAccum>-<BurstPeriodicity>-<NumOfBurstsInFrame>-<FramePeriodicity>-<NumOfFrames>
frameCfg 64 0 4000 1 100 0
%This argument describes the antenna layout of the device. This is the default (TI EVM) pattern.
% A1 A4
% A0 A3 A2 A5
%<row0> <col0> <row1> <col1> <row2> <col2> <row3> <col3> <row4> <col4> <row5> <col5> <antDistX> <antDistY>
antGeometryCfg 1 1 1 0 0 1 1 3 1 2 0 3 2.5 2.5
%<pointCloud>
%<rangeProfile>
%<noiseProfile>
%<rangeAzimuthHeatMap>
%<rangeDopplerHeatMap>
%<statsInfo>
%<presenceInfo>
%<adcSamples>
%<trackerInfo>
%<microDopplerInfo>
%<classifierInfo>
guiMonitor 1 1 0 0 0 1 0 0 0 0 0
%<azimuthFftSize>
%<elevationFftSize>
%<motDetMode 1-major, 2-minor, 3-auto>
%<coherentDoppler>
%<numFrmPerMinorMotProc>
%<numMinorMotionChirpsPerFrame>
%<forceMinorMotionVelocityToZero>
%<minorMotionVelocityInclusionThr>
sigProcChainCfg 64 32 1 0 0 0 0 0
sensorPosition 0 0 0.3 0 45
cfarCfg 2 8 4 3 0 6.0 0 0.95 0 1 1 1
cfarScndPassCfg 0 2 8 4 3 1 25.0 0
aoaFovCfg -60 60 -20 20
rangeSelCfg 0.1 5.0
clutterRemoval 1
compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000
adcDataSource 0 adc_data_0001_CtestAdc6Ant.bin
adcLogging 2
lowPowerCfg 0
factoryCalibCfg 0 0 40 0 0x1ff000
configRANSAC 1 200 1.0
compressionCfg 0 0.5
baudRate 1250000
sensorStart 0 0 0 0
2) Refering to this .pdf from another post in this forum, i am checking/changing the code in dpc.c/mmwcli.c/linker.cmd as described. After that, i am building a release .appimage File.
3187.Raw ADC Data Streaming in IWRL6432.pdf
3. Flashing the built .appimage and change SW1.6 "on"
4. Sending .cfg via PUTTY without "SensorStart"
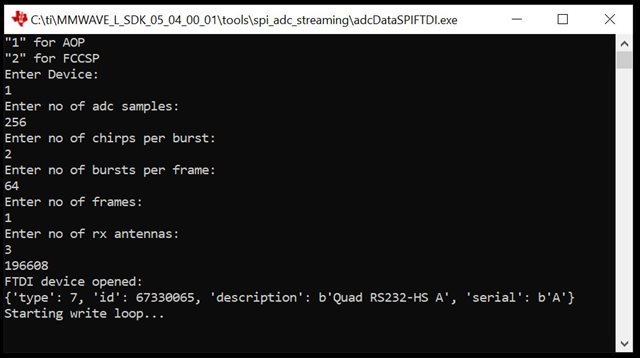
5. Starting "adcDataSPIFTDI.exe"
6. Sending SensorStart 0 0 0 0 with Putty
->After SensorStart, Putty shows:
Warning! Be cautious about ADC saturation when using this config
Done
->adcDataSPIFTDI.exe is showing "Starting write loop" and nothing happens after that. Adcdata.txt is empty.
Is this setup ok? Can i use this .cfg like this? Whats the difference between enabling ADC Streaming in MPD_DEMO or MMWAVE_Demo in CodeComposer IDE? (TrueGroundSpeed Demo has MMWAVE_Demo activated in syscfg after importing the project...).
Since I want to implement exactly this application (TrueGroundSpeed demo), I would be very happy to receive advice on how to configure it correctly.
Thank you in advance. Best regards
