



Tool/software:
Hi Ti Team,
Referring to the mmwave SDK documentation, i am trying to set up a 6432AOP device to capture true ground speed. The demo works fine with the default .cfg and the industrial visualizer. Now I would like to modify the demo as shown in the second picture in the SDK documentation.
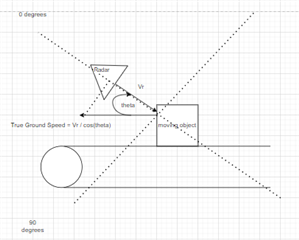
The sensor should be stationary with a fixed distance above the ground. The speed of slowly passing objects from the same direction should be determined. So far I don't know which parameters I have to change in the .cfg to accomplish this. I have tried to work with the SensorEstimator tool. But I can't figure out how the settings in this tool relate to the parameters created in the .cfg. What is the best approach in this case to find a suitable configuration? Best regards
