Tool/software:
Dears,

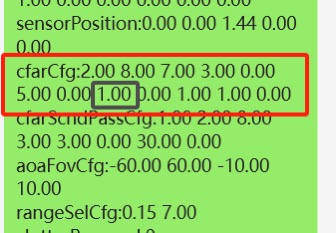
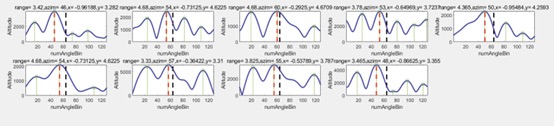
As shown in the above figure, our IWRL6432 scheme currently encounters a problem where A and B targets are placed on the left and right sides of the radar, and the distance between A and B targets is greater than the resolution; The radar will detect a point between target A and target B; This point is virtually generated.