
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Original question:

Tool/software:
Hi guys,
I've recently jumped to a project where I'm required to measure the height of a metal tank with a cylinder shape. The project was already on the POC phase so I'm trying to re-use the existing schematics to save months of development.
The magic is around the TDC1000 AFE that should be able to send a signal for a 1MHZ transducer and measure the TOF. I've been in the past days reading all the information that I could get about the TDC1000 and I found these interesting links: Ultrasonic ToF FAQ, Ultrasonic basics, TDC1000 application 1 and TDC1000 application 2. They were quite useful to get started and I was able to perform some accurate height readings for some certain levels of water inside of the tank. It's not fully functional for low levels and that's why I'm asking for help.
The schematic looks something like this:
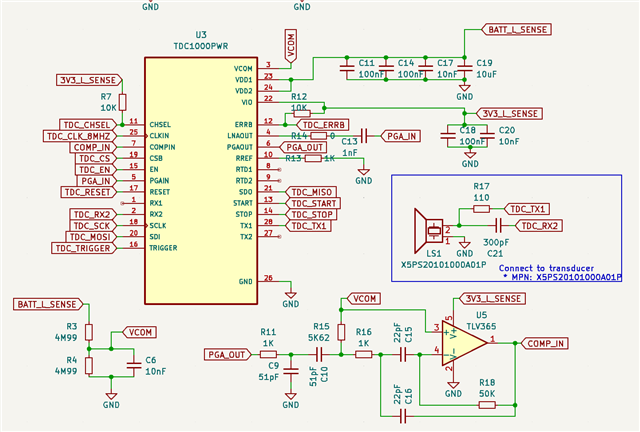
It's more or less in accordance with what the datasheet suggests with a minor modification on an extra amplification on the received signal.
My first question is about something mentioned on the datasheet which is: "The duration of the common-mode settling time is defined by the VCOM capacitor. With a 10-nF VCOM capacitor, the common-mode reference requires 16 µs to settle.". Does this means that C6 on the schematic is the capacitor mentioned on the datasheet? So, having a value of 100nF instead would make the settling time 10 times higher? That is not making a lot of sense in my mind, since C6 will charge as soon as BATT_L_SENSE is connected to the battery (4.2V) and continue charged unless a large load is connected.
My second question is about the observed signal on the oscilloscope:
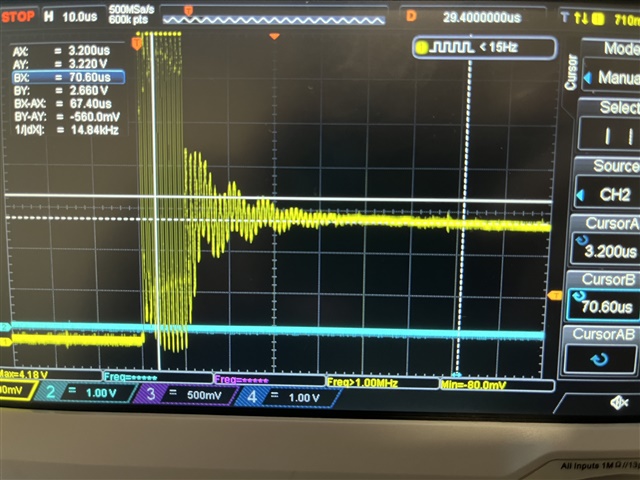
So, in this experiment I was sending 10 pulses, so 10us of transmitting time and then it seems to me that I have ringing of 30us? Is this right? In that case the transducer needs to be updated to a better one no?
I know that TUSS44x0 would probably be a better fit for this application but we need to operate with batteries, so I will never have voltages above 4.2V.
Thank you for the ongoing support,
Best regards,
Fernando Fontes





