


Tool/software:
Dear TI experts,
I am trying to work out a better cfar config for indoor applications and found there is a flag called dynamicFlag of the People Counting project. According constants defined in RADARDEMO_detectionCFAR.c and code in
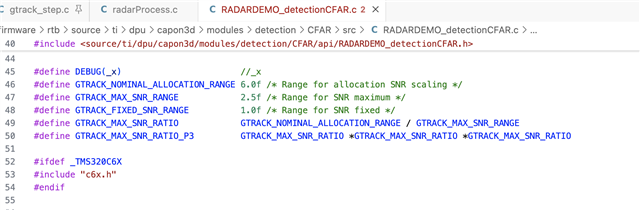
It uses a a constant threshold before GTRACK_FIXED_SNR_RANGE, this is fine. But why it's uses a linear INCREASE before reaching GTRACK_MAX_SNR_RANGE. Would you please help me understand why it's an increase slop rather than a down slop, like the line after GTRACK_MAX_SNR_RANGE in the following plot:
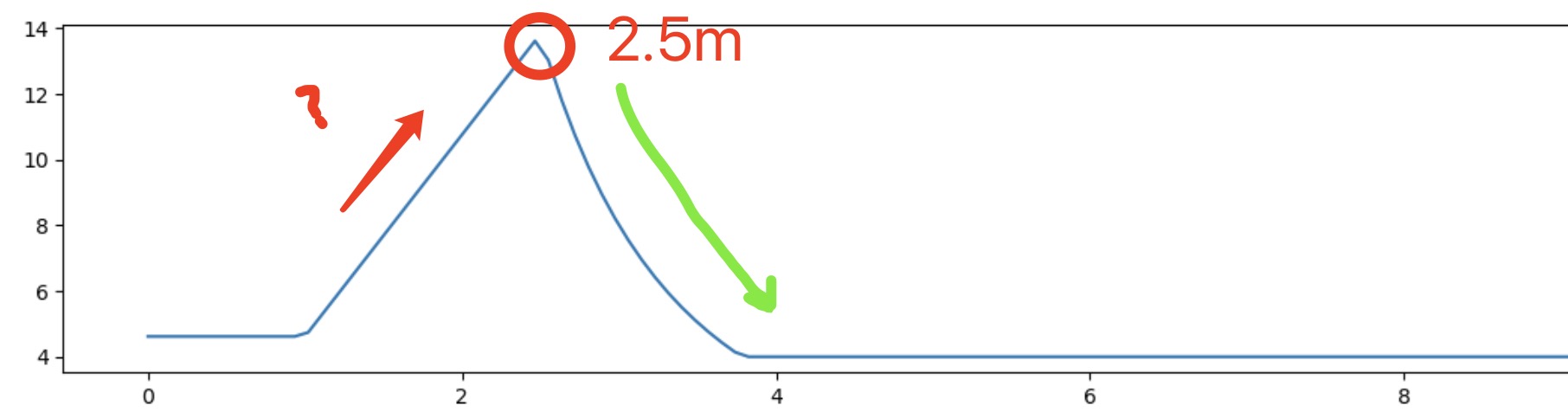
Does not it require smaller snr for longer distance if we want to detect an object? Would you please give more details about how to configure the constants use the first picture? Thanks
Best regards,
Guolong
