Other Parts Discussed in Thread: AWR2944, AWR1642, AWR1843
Tool/software:
I have AWR2944EVM, which I was able to successfully connect to the Demo visualizer tool after flashing TDM application.
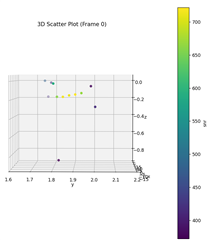
I put the sensor in a setup where there is a big metal object in front of it. This metal object is 60cm in width & 180cm tall. It is around 2m away from the sensor. On the Demo visualizer, I can see only 1 target!! I would expect to have more targets from this object.
- Do you think that I need to make some changes to the configuration?
- Just to confirm, is the default mode a target mode, or is it an object mode "Cluster of targets" ?