Tool/software:
Hi TI,
A question related to this issue: IWR6843AOP: How to clock gating DSS and MSS during the idle time between frames? - Sensors forum - Sensors - TI E2E support forums
In example <C:\ti\radar_toolbox_3_00_00_05\source\ti\examples\Fundamentals\xWR6843_Low_Power_Modes>,
- if I am not misunderstanding, this example doesn't use DSP?
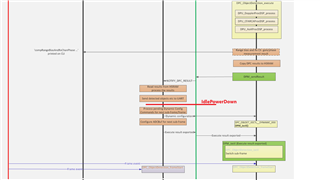
- The powerDownSemHandle is post after DPC_OBJDET_IOCTL__DYNAMIC_EXECUTE_RESULT_EXPORTED
In example <C:\ti\radar_toolbox_3_00_00_05\source\ti\examples\Industrial_and_Personal_Electronics\People_Tracking\3D_People_Tracking>,
- Should I just put the powerDownSemHandle post after DPM_ioctl, DPC_OBJDET_IOCTL__DYNAMIC_EXECUTE_RESULT_EXPORTED is called? <In function Pcount3DDemo_handleObjectDetResult>
- Should put the powerDownSemHandle post after UART is sent? I am not sure where is the UART sent ended.
/* Power down */ Semaphore_post(gMmwMCB.powerDownSemHandle);
In document <适用于IWR6843系列毫米波雷达SOC的软件功耗优化示例> or <ti.com/lit/an/swra689/swra689.pdf?ts=1743047875163>
- using 3D People Tracking example, where can I know when do the "Acquisition & 1D FFT" ends? or when do the "Capon BF" starts?