



Tool/software:
Hello team,
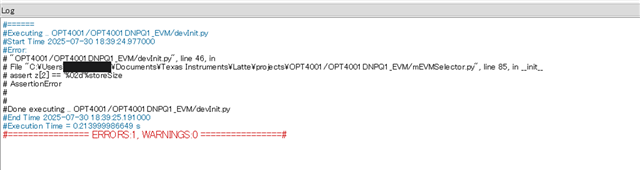
My customer cannot open GUI. Please teach me how to solove this issue.
I posted E2E before, change some script, it was solved.
The other engineer challenge today, and faced similar problem. But seeing from code, the script is newer. It means there are already changed script from previous version.
Regards,
Youhei MIYAOKA
import serial
from PySide import QtCore, QtGui
def evmSelectorSelected(val):
global regProg,capDev,dev,evmTitle,evmSelectList,evmSelectWindow,evmSelectCentralWidget,evmProgressBar
evmSelectCentralWidget.setEnabled(False)
evmProgressBar.setValue(10)
if(type(val) is QtGui.QListWidgetItem):
selection=evmSelectListWidget.currentRow()
else:
selection=val
evmTitle=evmSelectList[selection]
regProg = mMSPF5529Controller.MSP5529RegProgrammer(addr=evmList.control[0])
capDev = mMSPF5529Controller.MSP5529_OPT4XXX_Capture(dataPort=evmList.data[0],controlPort=evmList.control[0])
dev = mDevice.Device(fileName=scriptsRootDir+'OPT4001_EVM.dml',ignoreLast=False,regProgDevice=regProg,name='Registers View')
evmProgressBar.setValue(30)
mainWindow.runFile(scriptsRootDir+r'/resetDevice.py')
evmProgressBar.setValue(40)
mainWindow.runFile(scriptsRootDir+r'/updateGUIFromDevice.py')
evmProgressBar.setValue(50)
mainWindow.runFile(scriptsRootDir+r'/captureDataStructure.py')
evmProgressBar.setValue(70)
mainWindow.runFile(scriptsRootDir+r'/04-launchGUI.py')
evmProgressBar.setValue(100)
evmSelectWindow.close()
if('dev' in locals().keys()):
errorMessage=QtGui.QErrorMessage()
errorMessage.showMessage("Please clear session. Session->Clear Session (CTRL+T) or close and restart Latte")
errorMessage.resize(500,250)
else:
## Imports
# -------
import imp
import mDevice
scriptsRootDir=PROJECTS_DIR+r'OPT4001/OPT4001DNPQ1_EVM/'
mEVMSelector=imp.load_source('mEVMSelector',scriptsRootDir+r'mEVMSelector.py')
mMSPF5529Controller=imp.load_source('mMSPF5529Controller',scriptsRootDir+'/mMSP5529Programmer.py')
## Instance creation
# -----------------
evmFound=False
while(not evmFound):
evmList=mEVMSelector.EVMSelector()
if(len(evmList.control)>0):
evmFound=True
break
msgBox=QtGui.QMessageBox()
msgBox.setText("OPT4001 Connection Problem")
msgBox.setIcon(QtGui.QMessageBox.Critical)
msgBox.setInformativeText('OPT4001 not connected. Please check USB connection')
msgBox.setStandardButtons(QtGui.QMessageBox.Retry | QtGui.QMessageBox.Abort)
msgBox.setWindowTitle ('Connection Problem')
result=msgBox.exec_()
if(result==QtGui.QMessageBox.Retry):
continue
if(result==QtGui.QMessageBox.Abort):
#sys.exit(0)
mainWindow.closeEvent(QtGui.QCloseEvent)
break
evmSelectList=[]
for c0 in np.arange(len(evmList.control)):
evmSelectList.append('EVM%d:Control:%s/Data:%s'%(c0,evmList.control[c0],evmList.data[c0]))
evmSelectWindow=QtGui.QMainWindow()
evmSelectWindow.setWindowTitle('EVM Selector')
evmSelectListWidget= QtGui.QListWidget()
evmProgressBar=QtGui.QProgressBar()
evmProgressBar.setValue(0)
evmSelectListWidget.setToolTip('Double click to select EVM')
evmSelectListWidget.addItems(evmSelectList)
usableEVMsFlag=np.zeros(len(evmList.control),dtype=np.bool)
for c0 in np.arange(len(evmList.control)):
try:
ser=serial.Serial(port=evmList.control[c0])
ser.close()
alreadyOpen=False
except:
alreadyOpen=True
usableEVMsFlag[c0]=not alreadyOpen
if(alreadyOpen):
evmSelectListWidget.item(c0).setFlags(QtCore.Qt.NoItemFlags)
evmSelectCentralWidget=QtGui.QWidget()
evmSelectionLayout=QtGui.QVBoxLayout()
evmSelectionLayout.addWidget(evmSelectListWidget)
evmSelectionLayout.addWidget(evmProgressBar)
evmSelectCentralWidget.setLayout(evmSelectionLayout)
evmSelectWindow.setCentralWidget(evmSelectCentralWidget)
evmSelectListWidget.itemDoubleClicked.connect(evmSelectorSelected)
if(np.sum(usableEVMsFlag)==1):
evmSelectorSelected(np.argwhere(usableEVMsFlag).ravel()[0])
else:
evmSelectWindow.show()
import serial
from serial.tools import list_ports
import numpy as np
import re
import time
import globalDefs as Globals
def send(ser, cmd):
ser.write(cmd+'\r')
time.sleep(1e-3)
timeOut = 0xFFFF
while ((not ser.inWaiting()) and timeOut > 0):
timeOut -= 1
if (timeOut > 0):
retCode = ser.readline()
retCode = retCode.splitlines()[0]
retSp = retCode.split(':')
return retSp, retCode, timeOut
def sendCheck(ser, cmd):
retSp, retCode, timeOut = send(ser, cmd)
assert timeOut > 0
assert retSp[1] == '0'
return retSp, retCode, timeOut
def decodeHwrz(s):
a = ""
for i in range(3):
a += chr(int(s[2*i:2*i+2]))
return a
class EVMSelector():
VID=0x2047
PID=0x0A3C
dv=-1
def __init__(self):
portList=np.array([])
for port in serial.tools.list_ports.comports():
#print 'VID is 0x%04x PID is 0x%04x'%(port.vid,port.pid)
if((port.vid==self.VID) and (port.pid==self.PID)):
portList=np.append(portList,port)
if(np.size(portList)%2):
Globals.error('Number of ports with EVM\'s VID and PID seems to be odd number. Expected even number')
return
locList=dict()
self.control=np.array([])
self.data=np.array([])
self.controlP=np.array([])
self.dataP=np.array([])
#print portList
# import imp
# mMSP5503Programmer=imp.load_source('mMSP5503Programmer','c:/Asterix/projects/OPT3101/OPT3101EVMrevE3_TIDAWideFov/'+'/mMSP5503Programmer.py')
for i,port in enumerate(portList):
try:
ser=serial.Serial(port.device,9600)
#print "Passed to open",port.device
except:
#print "Failed to open",port.device
Globals.log('Serial port [%s] Locked'%port.device)
continue
ser.write('HWR?'+'\r')
storeSize=5
time.sleep(1e-3)
timeOut=0xFFFF
while((not ser.inWaiting()) and timeOut>0):
timeOut-=1
if(timeOut>0):
retCode=ser.readline()
retCode=retCode.splitlines()[0]
retSp=retCode.split(':')
#print "Appending ",retCode
if(retSp[1]=='C'):
retSp2, retCode2, timeOut2 = send(ser, 'HWRF')
if (timeOut2 > 0):
if (retSp2[1] == 'F'):
Globals.error("Invalid EVM detected")
return
elif (int(retSp2[1]) >= 1):
sendCheck(ser, 'FLS!R')
z = sendCheck(ser, 'FLSH')[0]
assert z[2] == '%02d'%storeSize
r = [sendCheck(ser, 'FLSR')[0][2] for i in range(storeSize)]
sendCheck(ser, 'FLS!R')
s = "".join([decodeHwrz(st) if i != 1 else st[2:6]
for i, st in enumerate(r)])
Globals.log("Device detected: " + s)
assert s == "OPT4001DNP-Q1EVM"
self.dv=1
else:
Globals.error('Communication Error.')
assert 0
self.controlP=np.append(self.controlP,port)
self.control=np.append(self.control,port.device)
if(retSp[1]=='D'):
self.dataP=np.append(self.dataP,port)
self.data=np.append(self.data,port.device)
ser.close()
if(not (np.size(self.controlP)==np.size(self.dataP))):
Globals.error('Number of Control and Data ports not matched. Unlock all COM ports')
return
for c0,port in enumerate(self.controlP):
try:
ser=serial.Serial(port.device,9600)
except:
Globals.log('Serial port [%s] Locked'%port)
continue
ser.write('HWRX%d'%(c0+1)+'\r')
ser.close()
dataOrder=[]
for c0,port in enumerate(self.dataP):
try:
ser=serial.Serial(port.device,9600)
except:
Globals.log('Serial port [%s] Locked'%port)
continue
ser.write('HWRX'+'\r')
time.sleep(1e-3)
timeOut=0xFFFF
while((not ser.inWaiting()) and timeOut>0):
timeOut-=1
if(timeOut>0):
retCode=ser.readline()
retCode=retCode.splitlines()[0]
retSp=retCode.split(':')
dataOrder.append(np.uint8(retSp[1])-1)
ser.close()
self.data=self.data[dataOrder]
self.dataP=self.dataP[dataOrder]
#for c0 in np.arange(np.size(
return
if __name__ == '__main__':
evmList=EVMSelector()
for c0 in np.arange(evmList.control.shape[0]):
print "Control Port for EVM %d is "%c0,evmList.control[c0]
print "Data Port for EVM %d is "%c0,evmList.data[c0]
