


Other Parts Discussed in Thread: IWRL6432, ,
Tool/software:
Hi,
We were planning to use MRR demo, but later we switch back to OOB (out of box) demo because of the problems explained below in Q3.
We have some questions regarding both MRR/OOB:
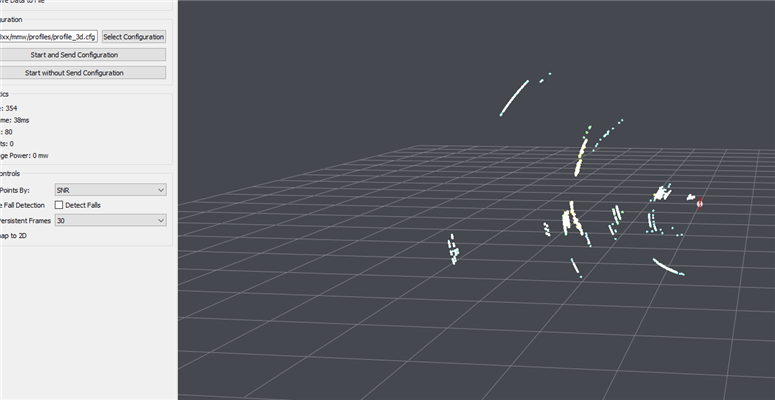
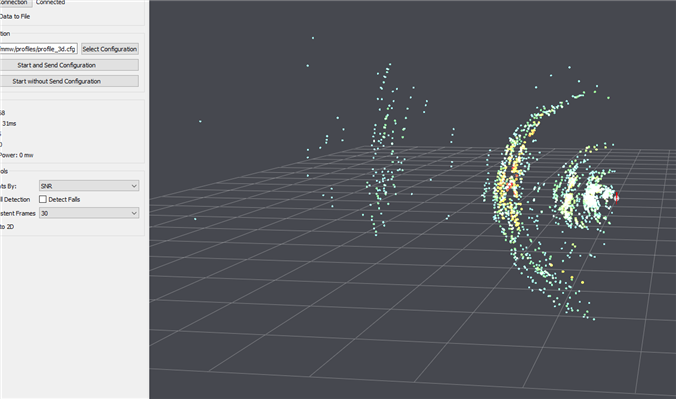
Point cloud output seems like spherical as seen in the pictures even though OOB demo outputs point cloud as x, y, z coordinates.
This spherical point cloud is also observed on MRR demo.
Previously, we used IWRL6432 whose point cloud output were not like this spherical form but more like cartesian.
1) Can you explain this form? Is it about AWR1843 or OOB demo?
*We are using AWR1843BOOST with profile_3d.cfg & profile_2d.cfg configurations.
2) Is it possible to get correct <x, y, z> coordinates of objects with OOB demo?
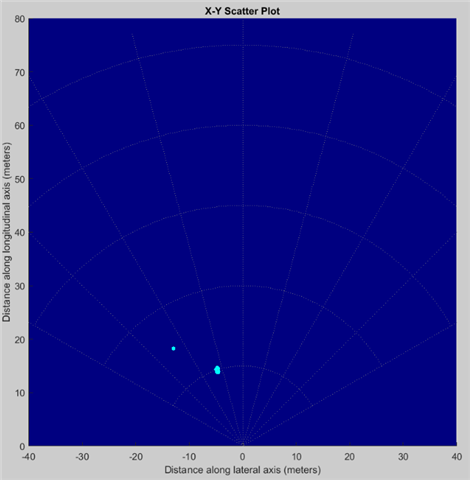
Because, the distance between radar and wall is not same for all elevation angles.
(eg. at 0° d=3.0m, at 30° d=3.2m)
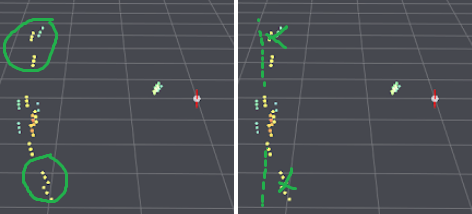
Also, we were testing MRR demo and realized problem in USRR subframe point cloud output as explained below post.
In short, as the target goes farther away (in straight line) from radar, its azimuth angle is increasing towards -y axes.
3) We could not find any solution in forum, assuming there is no solution to this error on MRR demo?
AWR1843BOOST: Wrong detection angle in the azimuth plane of the MRR beam steering lab code
Board: AWR1843BOOST
MMWAVE SDK: mmwave_sdk_03_06_02_00-LTS
Radar Toolbox: radar_toolbox_3_20_00_04
CCS: Code Composer Studio 12.8.1
Best Regards,
