Other Parts Discussed in Thread: IWR1443
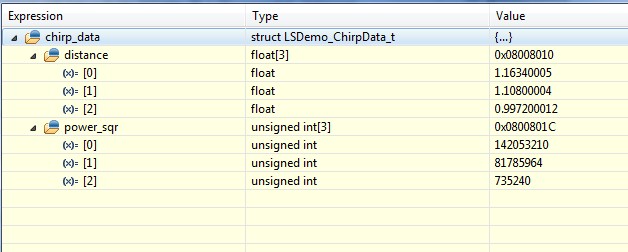
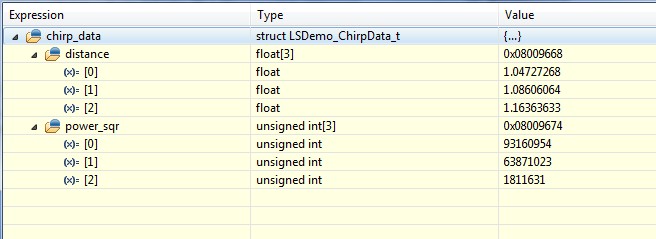
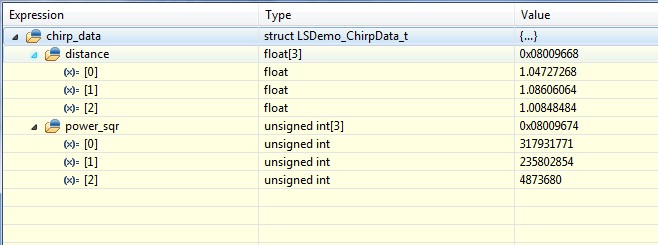
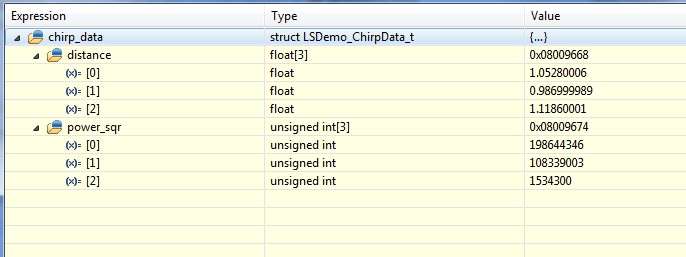
In the level_sense_demo project, if I set the "sample_rate" to 7.93 MSPS (from mmWave sensing estimate), all the measured the distances are zero, dis0=0, dis1=0, dis2=0,,if I change sample_rate to 8.2MSPS, the measured distances are dis0=3.4674 m, dis1=3.3512 m, dis2=3.5216 m, if I set sample_rate to 8.8 MSPS, dis0=3.2376 m, dis1=3.1240 m, dis2=3.1808 m, if further increase the sample_rate, the measured distance further reduce, the is the correct sample_rate, suppose to use? and what the relationship between the sample_rate and the distance? (normally high sample rate will get better accuracy, why it is not here, the maximum beat frequency is 7.14 MHz)
Thanks,